īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





AGVĄ─ī¦║Įėŗ╦ŃĮķĮB
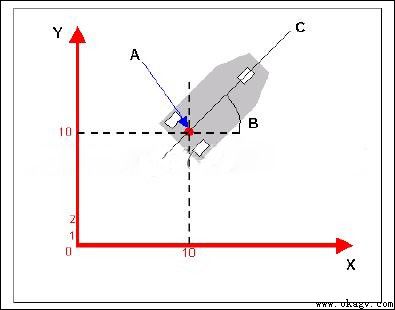
║åå╬ĄžšfŻ¼AGVī¦║ĮŠ═╩ŪūīAGV┤_īŹų¬Ą└ūį╝║į┌──└’Ż¼╝┤┤_Č©AGVūį╔Ēį┌╚½Šųū°ś╦ŽĄųąĄ─╬╗ų├Ż©x,yŻ®║═║ĮŽ“ĪŻ╚ńłD╦∙╩ŠŻ¼AGVęį³cA▒Ē╩ŠAGVį┌š¹éĆŲĮ├µū°ś╦ŽĄųąĄ─╬╗ų├Ż¼╝┤ģó┐╝³cŻ¼įō╬╗ų├│²┴╦xŻ¼yą┼Žó═Ō▀Ć░³║¼AGVąą▀MĘĮŽ“┼cx▌SĄ─ŖAĮŪą┼ŽóŻ©║ĮŽ“Ż®ĪŻ
AGV ī¦║ĮĄ─£╩┤_ą┼ŽóüĒūįĄž├µ╣╠Č©Ą─░ąś╦Ż©Č©╬╗ēK╗“╝ż╣ŌĘ┤╔õ░ÕĄ╚Ż®Ż¼ĘQų«×ķAGVĄ─Ī░īŹļH╬╗ų├Ī▒Ż¼Ą½═©│ŻŽ▐ė┌ł÷ĄžŚl╝■╝░Č©╬╗é„ĖąŲ„Śl╝■Ą─Ž▐ųŲŻ¼īŹļH╬╗ų├ą┼ŽóĄ─īŹ Ģrąį▓╗─▄ØMūŃAGV▀\äė┐žųŲĄ─ąĶ꬯¼×ķ┤╦į┌īŹļH╬╗ų├▓╔śėĄ─ų▄Ų┌ā╚▀ĆĒÜ▀Mąą╬╗ų├╣└╦ŃŻ©Dead ReckoningŻ®ĪŻ
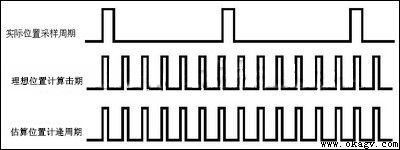
AGVĄ─īŹļH╬╗ų├╩ŪųĖĖ∙ō■Ąž├µ╣╠Č©░ąś╦ėŗ╦ŃČ°Ą├ĄĮĄ─īŹļH╬╗ų├ą┼ŽóŻ¼ŲõŠ½Č╚╚ĪøQė┌░ąś╦Ą─£y┴┐Š½Č╚ĪŻ
AGVĄ─└ĒŽļ╬╗ų├╩ŪųĖį┌└ĒŽļĀŅæBŽ┬Ą─╬╗ų├Ż¼ė╔AGVĄ─┬ĘÅĮ▄ē█EĘĮ│╠╦∙┤_Č©ĪŻ
AGVĄ─╣└╦Ń╬╗ų├╩ŪųĖį┌īŹļH╬╗ų├Ą─▓╔śėų▄Ų┌ā╚Ż¼═©▀^AGV«öŪ░╦┘Č╚║═▐DŽ“ĮŪą┼Žóī”╬╗ų├▀Mąą╣└╦Ń╦∙Ą├ĄĮĄ─╬╗ų├ĪŻ
╣└╦Ń╬╗ų├╩Ūšµš²ė├ė┌AGVī¦ę²┐žųŲĄ─Ż¼Č°īŹļH╬╗ų├ų╗╩ŪČ©Ų┌ī”╣└╦Ń╬╗ų├▀Mąąą▐š²Ż¼ī¦║Į╦∙ąĶĮŌøQĄ─å¢Ņ}Š═╩ŪĖ∙ō■AGVĄ─▀\äė─Żą═Ż¼╣└╦Ń│÷AGVĄ─«öŪ░╬╗ų├Ż¼╝┤╣└╦Ń╬╗ų├ĪŻ
╔Žę╗ŚlŻ║AGVĄ─ī¦ę²ėŗ╦ŃĘĮĘ© Ž┬ę╗ŚlŻ║AGVĄ─“īäėą╬╩Į
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā