Ū░čį
Ų¹▄ćąąśI(y©©)¼F(xi©żn)š²Įø(j©®ng)Üvų°Š▐┤¾Ą─ūāĖ’Ż¼«a(ch©Żn)ŲĘ╔·├³ų▄Ų┌▓╗öÓ┐sČ╠Ż¼Ė³┐ņĄ─Ė³ą┬?li©ón)Q┤·╦┘Č╚Ż¼Ė³éĆ(g©©)ąį╗»Ą─ėåå╬Č©ųŲ╗»╔·«a(ch©Żn)Ż¼ČÓĘN▄ćą═Īó┼õų├Ą─╣▓ŠĆ╗ņ«a(ch©Żn)╝║│╔×ķ¼F(xi©żn)Į±Ų¹▄ćąąśI(y©©)┤¾┌ģä▌(sh©¼)ĪŻ┼cų«┼õ╠ūĄ─Ų¹▄ćų„ę¬┴Ń▓┐╝■╔·«a(ch©Żn)Ż¼╚ń░l(f©Ī)äė(d©░ng)ÖC(j©®)Īóūā╦┘ŽõĪóæę╝▄ŽĄĮy(t©»ng)Ą╚čb┼õ╔·«a(ch©Żn)ę▓ļSų««a(ch©Żn)╔·┴╦┼cé„Įy(t©»ng)čb┼õ╔·«a(ch©Żn)╣ż╦ćĮž╚╗▓╗═¼Ą─ūāĖ’ĪŻ
é„Įy(t©»ng)Ų¹▄ć║¾ś“čb┼õŠĆČÓęįäė(d©░ng)┴”▌üĄ└ŠĆū„×ķ▌ö╦═║¾ś“▓┐╝■į┌Ė„éĆ(g©©)čb┼õ╣ż╬╗░┤╣żą“┴„▐D(zhu©Żn)Ą─▌ö╦═įO(sh©©)éõĪŻäė(d©░ng)┴”▌üĄ└ĮM│╔Ą─čb┼õ╔·«a(ch©Żn)ŠĆų„ę¬╚▒³c(di©Żn)╩ŪįO(sh©©)ėŗ(j©¼)╩®╣ż░▓čb═Ļ«ģ║¾╣ż╬╗╣ż╦ć▓╗─▄▌pęūĖ³Ė─ĪŻ
1.▒│Š░Ęų╬÷
1.1 BEVą┬─▄į┤▄ć║¾ś“╠ž³c(di©Żn)
ą┬─▄į┤▄ćĄ─║¾ś“šš▒╚╚╝ė═▄ćą═Ą─║¾ś“šš▒╚é„Įy(t©»ng)▄ćą═║¾ś“ĮY(ji©”)śŗ(g©░u)Ģ■(hu©¼)ČÓ│÷ļŖ│ž─µūāŲ„Īó┐žųŲŲ„Ą╚Ų„╝■Ż¼čb┼õ╣ż╦ć▒╚é„Įy(t©»ng)╚╝ė═▄ćą═Å═(f©┤)ļsĪŻ╣ż╬╗╣żą“ę▓Ģ■(hu©¼)ČÓĪŻčb┼õ║¾Ą─£y(c©©)įćŁh(hu©ón)╣Ø(ji©”)ę▓Ģ■(hu©¼)Ė³╝ėć└(y©ón)Ė±ĪŻ
1.2 ļSų°ć°ā╚(n©©i)CAFCŲ¾śI(y©©)ŲĮŠ∙╚╝┴ŽŽ¹║─┴┐Ę©ätĄ─═ŲÅVīŹ(sh©¬)╩®Ż¼▄ćŲ¾ąĶę¬╔·«a(ch©Żn)Ė³ČÓĄ─ą┬─▄į┤╝āļŖĪó╗ņäė(d©░ng)▄ćą═üĒŲĮ║ŌŲ¾śI(y©©)╚╝ė═Ž¹║─ųĖś╦(bi©Īo)ĪŻĖ„ć°ę▓Ž╚║¾╣½▓╝┴╦╚╝ė═▄ćĮ¹╩█Ą─Ģr(sh©¬)ķg▒ĒĪŻį┌▀@éĆ(g©©)┤¾▒│Š░Ž┬Ż¼─│ć°═Ōę╗ŠĆŲĘ┼Ųę▓ų°╩ų░l(f©Ī)▓╝Ųõųąą═SUVĄ─╝āļŖäė(d©░ng)(BEV)▄ćą═Ż¼īóŲõę²╚ļć°ā╚(n©©i)╔·«a(ch©Żn)ĪŻ▒Š╬─ĮķĮBĄ─AGV║¾ś“čb┼õŠĆŠ═╩Ū×ķŲõ┼õ╠ūČ°Į©įO(sh©©)Ą─ĪŻ
2.AGVčb┼õŠĆįO(sh©©)ėŗ(j©¼)
įō┐Ņ╝āļŖäė(d©░ng)▄ćą═║¾ś“ųž╝s 350KgŻ¼ŖAŠ▀╝s400KgĪŻ╔·«a(ch©Żn)▓╔ė├ę╗┼_(t©ói)AGV┼õų├ę╗╠ūŖAŠ▀Ż¼ę╗╠ūŖAŠ▀čb│ųę╗éĆ(g©©)║¾ś“╣ż╝■Ż¼░┤╣ż╦ćĒśą“ę└┤╬ū▀ąąĖ„éĆ(g©©)čb┼õ╣ż╬╗ĪŻ
Łh(hu©ón)ŠĆ▓╝ų├ėą19éĆ(g©©)╣ż╬╗Ż¼ęŖłD1Ż¼Ųõųą1éĆ(g©©) Bypass ų¦┬Ę╣ż╬╗Ż¼1éĆ(g©©)éõė├╣ż╬╗Ż¼1éĆ(g©©)WA(Wheel Alignment)station╣ż╬╗ĪŻį┌Łh(hu©ón)ŠĆ¢|é╚(c©©)▓╝ų├ŠSą▐ģ^(q©▒)ė“╝░ŠSą▐ų¦┬Ę┬ĘŠĆĪŻ▓┘ū„╣ż╬╗ķL(zh©Żng)Č╚Ż║4.5M ╔·«a(ch©Żn)╣Ø(ji©”)┼─Ż║18U/h ╝╚├┐ąĪĢr(sh©¬)═Ļ│╔ 18 éĆ(g©©)╣ż╝■Ą─čb┼õĪŻ
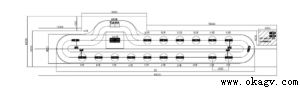
łD 1 AGV Łh(hu©ón)ŠĆ▓╝ŠųłD
2.1 AGV ▄ćą═įO(sh©©)ėŗ(j©¼)
Ė∙ō■(j©┤)«a(ch©Żn)ŲĘ│▀┤ńĪóųž┴┐┤_Č© AGV Ą─žō(f©┤)▌dģóöĄ(sh©┤)Ż¼▀x╚Ī“ī(q©▒)äė(d©░ng)▌å“ī(q©▒)äė(d©░ng)ļŖÖC(j©®)╣”┬╩ĪóļSäė(d©░ng)▌åŻ¼┤_Č©▌åŽĄĪŻįO(sh©©)ėŗ(j©¼)▄ć¾wĮY(ji©”)śŗ(g©░u)Ż¼┼┼▓╝ļŖÜŌ▓╝ŠųĪŻśI(y©©)ų„╩ŪÜWų▐ę╗ŠĆŲĘ┼Ų┐═æ¶Ż¼įO(sh©©)ėŗ(j©¼)ś╦(bi©Īo)£╩(zh©│n)ģó┐╝ CE ║═ TUVšJ(r©©n)ūCś╦(bi©Īo)£╩(zh©│n)Ż¼│÷Š▀TUVšJ(r©©n)ūCł¾(b©żo)ĖµĪŻ
2.2 AGV äė(d©░ng)┴”ŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)
AGV įO(sh©©)ėŗ(j©¼)ųąūŅųžę¬Ą─Š═╩Ūäė(d©░ng)┴”ŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼)Ż¼Ųõ┴„│╠ęŖłD 2.,Ųõėų╝Ü(x©¼)Ęų×ķ▌åŽĄįO(sh©©)ėŗ(j©¼)Īó“ī(q©▒)äė(d©░ng)╣”┬╩ėŗ(j©¼)╦ŃĪóļŖÖC(j©®)▀x╚ĪĪŻ
2.3 ▌åŽĄįO(sh©©)ėŗ(j©¼)
Ė∙ō■(j©┤)║¾ś“╣ż╝■Ą─ūŅĮKčb┼õųž┴┐╝░ŲõŖAŠ▀Ą─ųž┴┐Ż¼▀x╚ĪįO(sh©©)ėŗ(j©¼)žō(f©┤)▌d×ķ1揥─▒│±Wą═Ż©DeckŻ®AGVĪŻ║¾ś“čb┼õ╣ż╦ćŠÄ┼┼┬ĘŠĆ╩ŪŁh(hu©ón)ą╬┬ĘŠĆŻ¼¤oé╚(c©©)ęŲĪóūįą²▀\(y©┤n)äė(d©░ng)ĘĮ╩ĮŻ¼¤oąĶ▓╔ė├╚½ĘĮ╬╗Ż©OMNi-MovingŻ®▌åŽĄĮY(ji©”)śŗ(g©░u)ĪŻčb┼õ╣ż╦ćųą WA ╣ż╬╗┼cWheel AlignmentįO(sh©©)éõī”(du©¼)ĮėŻ¼ėąī”(du©¼)AGV═Ż▄ćŠ½Č╚ėąĪ└3mmĄ─ę¬Ū¾Ż¼į┌AGVų„┴„“ī(q©▒)äė(d©░ng)▌åĘĮ╩Įå╬ȵ▌å║═▓Ņäė(d©░ng)ȵ▌åā╔ĘNĘĮ╩ĮųąÖMŽ“▒╚▌^Ż¼å╬ȵ▌åĘĮ╩Į┐╔ęį▒ŻūCĖ³Ė▀Ą─ū▀ąą║══Ż▄ćŠ½Č╚Ż¼╦∙ęįAGV▌åŽĄ▀xČ©å╬ȵ▌å“ī(q©▒)äė(d©░ng)+2Č©Ž“ļSäė(d©░ng)▌åĘĮ╩ĮĪŻ
2.4 “ī(q©▒)äė(d©░ng)╣”┬╩ėŗ(j©¼)╦Ń
¼F(xi©żn)Į± AGV ŽĄĮy(t©»ng)ų„┴„Ą─ļŖÜŌŽĄĮy(t©»ng)ļŖē║ėą 24VĪó48V ║═ 96VÄūĘNŻ¼ī”(du©¼)ė┌ųąĄ═žō(f©┤)▌dę╗░Ń▀xō±24VŽĄĮy(t©»ng)ļŖē║ĪŻ▀xō±“ī(q©▒)äė(d©░ng)ļŖÖC(j©®)Ż¼ėŗ(j©¼)╦ŃļŖÖC(j©®)╣”┬╩ĪŻ
Ė∙ō■(j©┤)Ż║
ėŗ(j©¼)╦ŃļŖÖC(j©®)╣”┬╩ P=600WĪŻ
Įy(t©»ng)ėŗ(j©¼) AGV ▄ć¾wļŖÜŌŽĄĮy(t©»ng)Ųõ╦³ļŖÜŌė├ļŖ┴┐Ż¼į┌═Ż▄ć┤²ÖC(j©®)ĀŅæB(t©żi)ļŖ┴„╝s5AŻ¼į┌╚½╦┘▀\(y©┤n)ąąĀŅæB(t©żi)ļŖ┴„╝s20AĪŻĖ∙ō■(j©┤)Łh(hu©ón)ŠĆ╣ż╬╗╣żū„Ģr(sh©¬)ķL(zh©Żng)Ż¼┼┼▓╝│õļŖšŠ▓╝ŠųŻ¼│§▓Į▀xČ©4éĆ(g©©)│õļŖšŠ▓╝ų├į┌═Ż▄ć╣żū„Ģr(sh©¬)ķL(zh©Żng)▌^ķL(zh©Żng)Ą─╣ż╬╗ĪŻĮY(ji©”)║Ž╣Ø(ji©”)┼─ėŗ(j©¼)╦ŃŻ¼ėŗ(j©¼)╦ŃļŖ│žļŖ┴┐ōp║─╝░ča(b©│)│õŻ¼░┤šš│õļŖą¦┬╩║═Į³│õØMĢr(sh©¬)│õļŖą¦┬╩ĮĄĄ═Ą╚ę“╦žŻ¼╚ĪļŖ┴┐ča(b©│)│õėÓ┴┐ 20%Ż¼▀x╚Ī60AH õćļxūėäė(d©░ng)┴”ļŖ│žĪŻ“×(y©żn)╦Ń4éĆ(g©©)│õļŖšŠ┐╔ęįØMūŃ│õĘ┼╩╣ė├ę¬Ū¾ĪŻ
2.5 AGV ▄ćöĄ(sh©┤)ėŗ(j©¼)╦Ń
Ė∙ō■(j©┤)╣ż╬╗ķL(zh©Żng)Č╚Ż¼╔·«a(ch©Żn)╣Ø(ji©”)┼─Ż¼├┐╣ż╬╗▓┘ū„╣ż╦ćĢr(sh©¬)ķL(zh©Żng)ĪŻėŗ(j©¼)╦ŃAGV å╬▄ćąąū▀╚½┴„│╠Ģr(sh©¬)ķL(zh©Żng)Ż¼Ė∙ō■(j©┤)«a(ch©Żn)┴┐╣Ø(ji©”)┼─Ż¼ŠC║ŽįO(sh©©)éõą¦┬╩Ż¼╝┤┐╔ėŗ(j©¼)╦Ń│÷╦∙ąĶAGV▄ćöĄ(sh©┤)┴┐ĪŻ
2.6 AGV ▄ć¾w▓╝ŠųįO(sh©©)ėŗ(j©¼)
═Ōą╬ĮY(ji©”)śŗ(g©░u)Ż║AGV▄ć¾wę╗░ŃĘų×ķ╚²┤¾ų„ę¬╣”─▄┼ōŻ¼“ī(q©▒)äė(d©░ng)▌å┼ōĪóļŖ│ž┼ō║═ļŖŲ„┼ōŻ©ęŖłD2Ż®ĪŻAGVĄū▒P▓╝ŠųĘų×ķ“ī(q©▒)äė(d©░ng)▌åĪóļSäė(d©░ng)▌å║═Ųõ╦³╣”─▄─ŻēKŻ¼“ī(q©▒)äė(d©░ng)▌å┼ō╣”─▄╩Ū░▓čb AGV“ī(q©▒)äė(d©░ng)▌å╝░ŲõĖĮ╝■Ż¼×ķAGVąąū▀╠ß╣®“ī(q©▒)äė(d©░ng)┴”╝░┐žųŲąąū▀ĘĮŽ“Ż¼ā╚(n©©i)▓┐ĮY(ji©”)śŗ(g©░u)ėą“ī(q©▒)äė(d©░ng)▌å▌å¾wĪóąąū▀ļŖÖC(j©®)ĪóȵļŖÖC(j©®)Īó£p╦┘Ų„║═ąąū▀┤a▒PŻ¼Čµ┤a▒P╝░Ž▐╬╗é„ĖąŲ„Īóäė(d©░ng)┴”ŠĆ└|Īó┐žųŲŠĆ└|ĪŻļŖ│ž┼ō╣”─▄╩Ū░▓čbAGVäė(d©░ng)┴”ļŖ│žĪó│õļŖĮėė|Ų„Ą╚Ż¼×ķAGVąąū▀╠ß╣®ļŖ┴”╣®æ¬(y©®ng)Ż¼▓ó┼cĄž├µ│õļŖÖC(j©®)śŗ(g©░u)äė(d©░ng)ū„ī”(du©¼)äė(d©░ng)┴”ļŖ│ž▀M(j©¼n)ąą│õļŖĪŻ
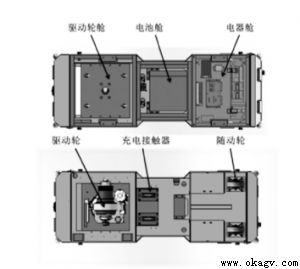
łD 2 AGV ▄ć¾w▓╝Šų
2.7 AGV ▄ć¾wĮY(ji©”)śŗ(g©░u)┴”īW(xu©”)Ę┬šµ
▄ć¾wįO(sh©©)ėŗ(j©¼)æ¬(y©®ng)ė├ SolidWorks(SW)▄ø╝■Į©┴ó╚²ŠSīŹ(sh©¬)¾w─Żą═Ż¼┐╔ėąą¦Ą─┤_Č©▄ć¾wĄ─┘|(zh©¼)┴┐Īó¾wĘeĪóųžą─Ą╚ģóöĄ(sh©┤)Ż¼▒Ńė┌║¾└m(x©┤)Ą──Żą═Ęų╬÷║═ųŲįņŻ¼▓ó┐╔╠ß╣®Š½┤_Ą─ģóöĄ(sh©┤)╗»īŹ(sh©¬)¾wįņą═║═╣ż│╠įO(sh©©)ėŗ(j©¼)łDĪŻ
2.8 AGV ┐žųŲŽĄĮy(t©»ng)
AGV▄ćų„┐ž▓╔ė├╬„ķTūėSimatic S7-1200ŽĄ┴ąPLCĪŻŲõ═©▀^AGV▄ć▌d¤oŠĆ┬Ęė╔Ų„┼cAGV┐žųŲ┼_(t©ói)¤oŠĆ▀BĮėŻ¼Įė╩š┐žųŲ┼_(t©ói)ųĖ┴ŅŻ¼╔Žł¾(b©żo)▄ć¾wĀŅæB(t©żi)ĪŻAGV ▄ć¾wų„┐žųŲŲ„═©▀^ CAN ┐éŠĆ┼cŽ┬╝ē(j©¬)▀\(y©┤n)äė(d©░ng)┐žųŲŲ„ MCUŻ©Motion Control UnitŻ®ŽÓ▀BŻ¼MCU┐žųŲAGV▄ć¾w╔ŽĖ„éĆ(g©©)▀\(y©┤n)äė(d©░ng)▌SŻ¼╚ńąąū▀ļŖÖC(j©®)Ż¼ČµļŖÖC(j©®)Ą╚ĪŻAGV▄ć¾wų„┐žųŲŲ„═©▀^CAN ┐éŠĆ┼cAGV▄ć¾w╔ŽĖ„é„ĖąŲ„Īó┐žųŲŲ„ŽÓ▀BŻ¼╚ń═©▀^░▓╚½└^ļŖŲ„┼c╝ż╣ŌĘ└┼÷é„ĖąŲ„PLSŽÓ▀BŻ¼┼cī¦(d©Żo)║Įé„ĖąŲ„ĪóRFID║═ļŖ│ž╣®ļŖŽĄĮy(t©»ng)ŽÓ▀BĪŻ
2.9 ╔Žīė┐žųŲ╝▄śŗ(g©░u)
AGV ╔ŽīėŲ¹▄ćÅS┐žųŲŽĄĮy(t©»ng)IPS-X▀M(j©¼n)ąąöĄ(sh©┤)ō■(j©┤)Į╗ōQŻ¼Įė╩š╔·«a(ch©Żn)ųĖ┴ŅŻ¼╔Žł¾(b©żo)AGVŽĄĮy(t©»ng)ĀŅæB(t©żi)╝░╔·«a(ch©Żn)▀^│╠öĄ(sh©┤)ō■(j©┤)ĪŻ
3.AGVčb┼õŠĆīŹ(sh©¬)╩®ą¦╣¹

łD 3 AGV ║¾ś“čb┼õŠĆ¼F(xi©żn)ł÷(ch©Żng)
═©▀^ī”(du©¼)BEV▄ćą═║¾ś“čb┼õ╣ż╦ćĄ─└ĒĮŌ║═įO(sh©©)ėŗ(j©¼)Ż¼īŹ(sh©¬)╩®┴╦ęįAGV╠µ┤·é„Įy(t©»ng)▌ö╦═▌üĄ└ŠĆĄ─ą┬čb┼õŠĆ─Ż╩ĮŻ¼ÅžĄūĖ─ūā┴╦▌üĄ└ŠĆš╝ė├ł÷(ch©Żng)ĄžŻ¼▓╗ęūĖ─ūā╣ż╬╗╣ż╦ćĄ─▒ūČ╦ĪŻĖ³║├Ą─▀mæ¬(y©®ng)┴╦╬┤üĒįō▄ćą═Ą─╔²╝ē(j©¬)ōQ┤·ąĶŪ¾Ż¼╩╣čb┼õŠĆŠ▀éõ╚ßąį╔·«a(ch©Żn)─▄┴”ĪŻĘ¹║ŽśI(y©©)ų„╝»łF(tu©ón)╬┤üĒÄū─Ļ╔·«a(ch©Żn)čbéõĄ─ųŪ─▄╗»░l(f©Ī)š╣ĘĮŽ“ĪŻ×ķ║¾└m(x©┤)╣ż│╠ęÄ(gu©®)äØśõ┴ó┴╦śė░ÕĒŚ(xi©żng)─┐ĪŻĖ³Ūą║Ž┴╦ć°╝ęųŪ─▄ųŲįņ┤¾░l(f©Ī)š╣æ(zh©żn)┬įŻ¼ę²ŅI(l©½ng)┴╦ć°ā╚(n©©i)ąąśI(y©©)░l(f©Ī)š╣ĘĮŽ“ĪŻŲõæ¬(y©®ng)ė├ĘŪ│ŻŠ▀ėąįōŅI(l©½ng)ė“Ž╚▀M(j©¼n)┤·▒ĒąįŻ¼īŹ(sh©¬)╩®║¾¼F(xi©żn)ł÷(ch©Żng)╔·«a(ch©Żn)╩╣ė├ą¦╣¹ę▓║▄└ĒŽļŻ¼ęŖłD3ĪŻųĄĄ├į┌═¼ąąśI(y©©)ųąæ¬(y©®ng)ė├═ŲÅVĪŻ
ģó┐╝╬─½I(xi©żn)
[1] ═§▄ŖĮ©,╔ąąĪ▌x.AGV ąĪ▄ć╝╝ąg(sh©┤)╝░Ųõį┌Ų¹▄ćųŲįņąąśI(y©©)Ą─æ¬(y©®ng)ė├[J].Ų¹▄ćīŹ(sh©¬)ė├╝╝ąg(sh©┤),2016,(5):187-189,199.doi: 10.16638/j.issn. 1671-7988.2016.05.061.
[2] │╠Į©éź,ÅłķL(zh©Żng)ė┬,±ę║Ż▓©,═§┼džö(c©ói).╗∙ė┌ S7-200 Ą─AGV┐žųŲŽĄĮy(t©»ng)įO(sh©©)ėŗ(j©¼) [J]. ÖC(j©®)ļŖ╣ż│╠╝╝ąg(sh©┤) ,2016,45(6):80-84.doi:10.3969/j.issn.1009-9492. 2016.06.021.
╬─š┬üĒį┤ė┌AGV░╔
╚ń╣¹▐D(zhu©Żn)▌dŻ¼šł(q©½ng)ūó├„▒Š╬─ĄžųĘŻ║http://m.so417.cn/jishu_14433015.html

║ŽÖC(j©®)Ų„╚╦")



