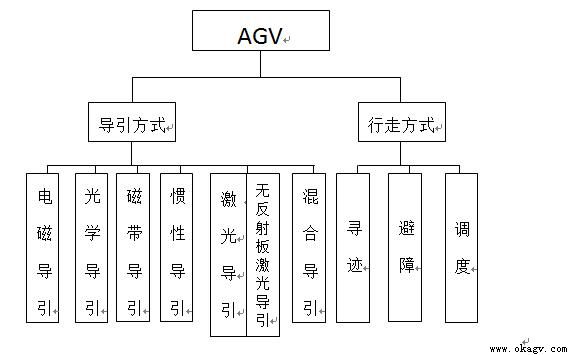
AGV╝╝ąg(sh©┤)Ęųų¦┐“╝▄łD
AGV ų„ę¬ė╔ī¦(d©Żo)Ž“─ŻēKĪóąąū▀─ŻēKĪó┐žųŲ─ŻēKĪó═©ėŹčbų├ĪóęŲ▌dčbų├║═ąŅļŖ│žĄ╚śŗ(g©░u)│╔Ż¼ŲõųąŻ¼ī¦(d©Żo)Ž“─ŻēK║═┐žųŲ─ŻēK╩ŪAGVĄ─ĻP(gu©Īn)µI─ŻēKĪŻAGV╝╝ąg(sh©┤)ūŅįń│÷¼F(xi©żn)į┌├└ć°(gu©«)Ż¼ų°├¹Ą─ĖŻ╠žŲ¹▄ć╣½╦Š╩ŪAGVæ¬(y©®ng)ė├Ą─Ž╚“ī(q©▒)Ż¼į┌1913─ĻĢr(sh©¬)Š═▓╔ė├ėą▄ēę²ī¦(d©Żo)Ą─AGV┤·╠µ▌ö╦═ÖC(j©®)į┌Ų¹▄ćĄū▒Pčb┼õŠĆ╔Žæ¬(y©®ng)ė├ĪŻ─ŪĢr(sh©¬)║“Ą─AGV▓ó▓╗ī┘ė┌ūįäė(d©░ng)ī¦(d©Żo)ę²ąĪ▄ćŻ¼Č°╩ŪąĶę¬ĮĶų·▄ēĄ└Ż¼į┌╠žČ©Ą─┬ĘÅĮ╔Žū„śI(y©©)Ż¼┼c¼F(xi©żn)į┌æ¬(y©®ng)ė├Ą─ūįų„ī¦(d©Żo)ę²AGV┤µį┌║▄┤¾Ą─▓Ņ«ÉĪŻ1953─Ļ├└ć°(gu©«)╣½╦ŠįO(sh©©)ėŗ(j©¼)┴╦Ą┌ę╗┼_(t©ói)ļŖ┤┼ī¦(d©Żo)ę²Ą─AGVŻ¼ļm╚╗▀@Ģr(sh©¬)║“AGVĄ─īŻ└¹▀Ć║▄╔┘Ż¼Ą½Å─┤╦ķ_(k©Īi)åó┴╦AGVī¦(d©Żo)║Į╝╝ąg(sh©┤)Ą─蹊┐¤ß³c(di©Żn)ĪŻ
20╩└╝o(j©¼)80─Ļ┤·ęįüĒ(l©ói)ķ_(k©Īi)åó┴╦AGV╝╝ąg(sh©┤)蹊┐Ą─ę╗éĆ(g©©)ąĪĖ▀ĘÕŻ¼ų„ę¬╩Ūę“?y©żn)ķ¤o(w©▓)ŠĆī¦(d©Żo)ę²╝╝ąg(sh©┤)▒╗ę²╚ļĄĮAGVŽĄĮy(t©»ng)ųąŻ¼Ųõųąė░ĒæūŅ┤¾ūŅĄõą═Ą─╩Ū╝ż╣Ōī¦(d©Żo)ę²ĪŻ╝ż╣Ōī¦(d©Żo)ę²Ą─ę²╚ļŻ¼╩╣AGVį┌ņ`╗Ņąį║═Š½£╩(zh©│n)Č╚╔Ž╚ĪĄ├Š▐┤¾Ą─▀M(j©¼n)▓ĮĪŻų«║¾21╩└╝o(j©¼)│§AGVĄ─╝╝ąg(sh©┤)蹊┐▀M(j©¼n)╚ļŲ┐ŅiŲ┌Ż¼▀@Ģr(sh©¬)Ų┌Ą─AGVīŻ└¹╔Ļšł(q©½ng)┴┐│╩Ž┬╗¼┌ģä▌(sh©¼)Ż¼╝▒ąĶ╣ź┐╦Ą─╝╝ąg(sh©┤)ļyŅ}╩Ūņ`╗Ņąį║═┤¾ą═š{(di©żo)Č╚ŽĄĮy(t©»ng)Ą─╝»│╔īŹ(sh©¬)ė├ĪŻ2010─Ļ║¾AGVėŁüĒ(l©ói)┴╦┴Ēę╗éĆ(g©©)░l(f©Ī)š╣Ė▀ĘÕŻ¼▀@Ą├ęµė┌┤¾ą═Ę■äš(w©┤)Ų„ĪóöĄ(sh©┤)ō■(j©┤)╠Ä└ĒŲ„Ą─ķ_(k©Īi)░l(f©Ī)║═ą┬ą═ī¦(d©Żo)ę²ĘĮ╩ĮĄ─æ¬(y©®ng)ė├Ż¼╚ń¤o(w©▓)Ę┤╔õ░Õ╝ż╣Ōūįų„ī¦(d©Żo)║Į╝╝ąg(sh©┤)Ż¼╩╣Ą├AGVĖ³╝ėųŪ─▄Ūę─ŻēK╗»ĪŻ
AGVÖC(j©®)Ų„╚╦Ą─īŻ└¹╔Ļšł(q©½ng)┴┐ų„ę¬╝»ųąį┌╚š▒ŠĪó├└ć°(gu©«)ĪóÜWų▐ĪóĒnć°(gu©«)Īóųąć°(gu©«)Ą╚ć°(gu©«)╝ęŻ¼╚š▒Š═©▀^(gu©░)ī”(du©¼)Å═(f©┤)ļsAGV║å(ji©Żn)╗»čąŠ┐Ż¼▐D(zhu©Żn)╗»×ķAGCŻ¼į┌īŻ└¹╔Ļšł(q©½ng)┴┐╔Ž│¼įĮAGV░l(f©Ī)į┤ć°(gu©«)├└ć°(gu©«)Ż¼┼┼├¹Ą┌ę╗ĪŻųąć°(gu©«)ę²╚ļAGVĄ─Ģr(sh©¬)ķg▒╚▌^═ĒŻ¼Ą½ėą║¾üĒ(l©ói)Šė╔ŽĄ─┌ģä▌(sh©¼)Ż¼AGV╔Ļšł(q©½ng)┴┐┼┼├¹āH┤╬ė┌╚š▒ŠŻ¼š╝ō■(j©┤)Ą┌Č■╬╗ĪŻć°(gu©«)ā╚(n©©i)Ą─īŻ└¹╔Ļšł(q©½ng)╚╦ų„ę¬╝»ųąį┌Ė▀ąŻ║═ųąąĪŲ¾śI(y©©)Ż¼ŲõųąĖ▀ąŻ╔Ļšł(q©½ng)╚╦╚ń╠Kų▌╣żśI(y©©)ł@ģ^(q©▒)┬ÜśI(y©©)╝╝ąg(sh©┤)īW(xu©”)į║Īó─ŽŠ®║Į┐š║Į╠ņ┤¾īW(xu©”)Īó║ŽĘ╩╣żśI(y©©)┤¾īW(xu©”)Ą╚ĪŻųąąĪŲ¾śI(y©©)╔Ļšł(q©½ng)╚╦ųąŻ¼░¼╝¬═■ÖC(j©®)Ų„╚╦ėąŽ▐╣½╦Š╦∙š╝▒╚ųž▌^┤¾Ż¼2014─Ļ║¾ūŅą┬╔Ļšł(q©½ng)┴┐┼┼├¹╚½ć°(gu©«)Ą┌ę╗Ż¼Ūę╔Ļšł(q©½ng)┘|(zh©¼)┴┐▌^Ė▀Ż¼░l(f©Ī)├„īŻ└¹▌^ČÓŻ¼░³└©¤o(w©▓)Ę┤╔õ░Õ╝ż╣Ōūįų„ī¦(d©Żo)║Į╝╝ąg(sh©┤)Ą─░l(f©Ī)├„īŻ└¹ĪŻ
AGV╝╝ąg(sh©┤)Ęųų¦┐“╝▄łD
═©▀^(gu©░)ī”(du©¼)AGV ŽÓĻP(gu©Īn)īŻ└¹╬─½I(xi©żn)Ą─ś╦(bi©Īo)ę²Ż¼░l(f©Ī)¼F(xi©żn)īŻ└¹╔Ļšł(q©½ng)é╚(c©©)ųžŅI(l©½ng)ė“║▄ČÓŻ¼Ųõ║╦ą─░³└©Ė─╔Ųī¦(d©Żo)║ĮĘĮ╩Į蹊┐Ż©Ė∙ō■(j©┤)Š▀¾wĄ─æ¬(y©®ng)ė├Łh(hu©ón)Š│▀x╚Ī╠žČ©Ą─ī¦(d©Żo)ę²ĘĮ╩ĮŻ¼╗“š▀▓╔ė├ČÓĘNī¦(d©Żo)ę²ĘĮ╩ĮĮY(ji©”)║ŽĄ─ĘĮ╩Į╚ĪķL(zh©Żng)ča(b©│)Č╠ęį▀_(d©ó)ĄĮ▌^║├Ą─ŠC║Žą¦╣¹Ż®Ż¼AGV ūį╔ĒČ©╬╗Š½Č╚Īó┐žųŲŽĄĮy(t©»ng)║═┬ĘÅĮęÄ(gu©®)äØĘĮĘ©Ż¼╚ń═©▀^(gu©░)Ė─▀M(j©¼n)ī¦(d©Żo)ę²įO(sh©©)éõūį╔Ēęį╠ßĖ▀Č©╬╗Š½Č╚Īó╝»│╔┐žųŲŽĄĮy(t©»ng)Ą─įO(sh©©)ėŗ(j©¼)Īó┬ĘÅĮęÄ(gu©®)äØĘĮĘ©Ą─▀xō±×ķīŹ(sh©¬)¼F(xi©żn)AGVĄ─Š½┤_Č©╬╗ĪŻ
ŠC╔Ž╦∙╩÷Ż¼AGV ļSų°ėŗ(j©¼)╦ŃÖC(j©®)╝╝ąg(sh©┤)║═ųŪ─▄┐žųŲ▓▀┬įĄ─░l(f©Ī)š╣Ż¼ķ_(k©Īi)╩╝ū▀Ž“╝»│╔╗»║═ųŪ─▄╗»Ż¼ų„ę¬ĻP(gu©Īn)ūó³c(di©Żn)×ķAGV ūį╔ĒČ©╬╗Ą─Š½£╩(zh©│n)ąį║═ąąū▀ĘĮ╩ĮĄ─┐žųŲŻ¼Ūę╔µ╝░║╦ą─╝╝ąg(sh©┤)Ą─╔Ļšł(q©½ng)┴┐ų„ę¬╝»ųąį┌ÜW├└╚šĒnĄ╚ć°(gu©«)╝ęŻ¼╬ęć°(gu©«)į┌AGV ĘĮ├µŲ▓Į▌^═ĒŻ¼╬┤üĒ(l©ói)æ¬(y©®ng)╝»ųąŠ½┴”Ė─▀M(j©¼n)ī¦(d©Żo)║ĮĘĮ╩ĮĪó┐žųŲĘĮ╩Įęį╝░AGVĮY(ji©”)śŗ(g©░u)╔ŽŻ¼į┌AGVų¬ūR(sh©¬)«a(ch©Żn)ÖÓ(qu©ón)╔ŽĀÄ(zh©źng)╚ĪĖ³ČÓĄ─įÆšZ(y©│)ÖÓ(qu©ón)ĪŻ
╚ń╣¹▐D(zhu©Żn)▌dŻ¼šł(q©½ng)ūó├„▒Š╬─ĄžųĘŻ║http://m.so417.cn/jishu_14432652.html

║ŽÖC(j©®)Ų„╚╦")



