īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





ūįäėī¦ę²▄ć AGV ( automated guided vehicle) ╩ŪųĖęįĖ„ŅÉļŖĪó┤┼Īó┬ĢĪó╣Ōé„ĖąŲ„×ķūįäėī¦ę²čbų├Ż¼─▄ē“░┤ššŅAįOī¦ę²┬ĘÅĮąą±éĄ─¤o╚╦±{±é▀\▌ö▄ćŻ█1Ż▌Ż« ļSų°ųŪ╗█╣żÅS┼cųŪ─▄╬’┴„Ą─▓╗öÓ░lš╣Ż¼ųž▌d AGV ėą═¹│╔×ķųŪ╗█é}ā”╬’┴„ŽĄĮyĄ─ĻPµIĮŪ╔½Ż¼īŹ¼FĖ„╔·«aŁh╣Ø╬’┴ŽĄ─ūįäė▀\▌öŻ¼▒ŻūCš¹éĆ╔·«aŠĆĖ▀ą¦▀\ąąŻ█2ŻŁ3Ż▌Ż«
AGVĄ─ī¦║ĮČ©╬╗Š½Č╚║═┬ĘÅĮš{š¹─▄┴”╩ŪųŲ╝sŲõį┌╣żśIŅIė“═ŲÅVæ¬ė├Ą─Ų┐ŅiŻ█4Ż▌Ż««öŪ░Ą─ī¦║ĮĘĮ╩Įų„ę¬ėą┤┼ī¦║ĮŻ█5ŻŁ6Ż▌ĪóæTąįī¦║ĮŻ█7Ż▌Īó╝ż╣Ōī¦║ĮŻ█8Ż▌ĪóęĢėXī¦║ĮŻ█9Ż▌Ą╚Ż«
┤┼ī¦║Į▀\ė├ļŖ┤┼Ėąæ¬įŁ└ĒŻ¼Ųõī¦║Įį¬╝■ČÓĘNČÓśėŻ¼╚ńĄžś╦┤┼ßöŻ█5Ż▌ĪóļŖ£u┴„ŠĆ╚”║═╔õŅlŲ„╝■Ż█6Ż▌Ą╚Ż¼ļm╚╗┤┼ī¦║Įį┌AGVąąśIųąæ¬ė├ÅVĘ║Ż¼Ą½ŲõõüįO│╔▒Š▌^Ė▀Ż¼▓╗▒Ńė┌║¾Ų┌ŠSūo┼cš{š¹Ż¼ļyęįØMūŃ¼F┤·╗»╚ßąį╔·«a▀^│╠ųąĄ─ųž▌d▐D▀\ąĶŪ¾;æTąįī¦║Į╝╝ągČ©╬╗£╩┤_ąįĖ▀Ż¼ņ`╗ŅąįÅŖŻ¼Ą½ī”┐žųŲ╦ŃĘ©Ą─ę¬Ū¾▌^Ė▀Ūę╚▌ęū╩▄ų▄ć·ŁhŠ│Ą─ė░Ēæ;╝ż╣Ōī¦║ĮąĶį┌AGVąą±é┬ĘÅĮĄ─ų▄ć·░▓čb╝ż╣ŌĘ┤╔õ░ÕŻ¼ī”░▓čbĮŪČ╚║═╬╗ų├Č╝ėąĘŪ│ŻŠ½┤_Ą─ę¬Ū¾Ż¼│╔▒Š▌^Ė▀Ż¼Ūęęū╩▄ŁhŠ│Ė╔ö_Ż¼▓╗▀m║ŽŁhŠ│Å═ļsĄ─╣żÅSŁhŠ│;ęĢėXī¦║Į└¹ė├łDŽ±╠Ä└Ē╝╝ąg▀Mąąī¦║ĮŻ¼æ¬ė├ė┌╣żśIųž▌dAGVĮøØ·│╔▒ŠĄ═ĪóīŹė├ąįÅŖŻ¼Ą½é„ĮyĄ─ęĢėXī¦║ĮĘĮ╩Į┤¾ČÓ▓╔ė├╔½Ä¦ę²ī¦ĪóÆ▀┤aČ©╬╗ĘĮ╩ĮŻ¼į┌īŹļHæ¬ė├ųą┤µį┌┬ĘÅĮõüįOÅ═ļsĪó╔½Ä¦ęū╩▄ŁhŠ│Ė╔ö_Ą╚å¢Ņ}Ż«į┌īŹļH▀\ąą▀^│╠ųąŻ¼AGVĄ─▀\ąą▄ē█E╚▌ęūę“ĘŪŠĆąįę“╦ž║═ŽĄĮyā╚Īó═Ō▓┐ö_äėė░ĒæČ°│÷¼FŲ½▓ŅŻ«
×ķ┴╦╠ßĖ▀AGVŽĄĮy┐žųŲŠ½Č╚Ż¼╬─½IŻ█10Ż▌īóPID┼c─Ż║²┐žųŲŽÓĮY║ŽŻ¼▓╔ė├─Ż║²ęÄätī”PID┐žųŲģóöĄ▀Mąąį┌ŠĆš{š¹Ż¼ļm╚╗ŽĄĮyŠ▀ėąę╗Č©Ą─¶ö░¶ąįŻ¼Ą½ī”Å═ļsČÓūāĄ─æ¬ė├ŁhŠ│▀mæ¬ąį▌^▓ŅŻ«╬─½IŻ█11Ż▌╠ß│÷Ą─ūį▀mæ¬Ę┤č▌╗¼─Ż┐žųŲĘĮĘ©╩╣ŽĄĮyĒææ¬Ė³┐ņŻ¼¶ö░¶ąįĖ³ÅŖŻ¼ŪęŠ▀ėą┴╝║├Ą─╦▓Ģrąį─▄Ż¼Ą½ė├ė┌ųž▌dAGVęū│÷¼FČČš±¼FŽ¾Ż¼ų▒Įėė░Ēæ┐žųŲą¦╣¹Ż«ūį┐╣ö_┐žųŲ ADRC(active disturbance rejection control)╝╝ągį┌PID┐žųŲ╗∙ĄA╔ŽŻ¼īóĘŪŠĆąįę“╦ž║═ŽĄĮyā╚Īó═Ō▓┐ö_äėęĢ×ķ┐éö_äėŻ¼═©▀^śŗįņöUÅłĀŅæBė^£yŲ„ī”┐éö_äė▀MąąīŹĢr╣└ėŗ┼cčaāöŻ¼Ž¹│²Ė„ĘN▓╗┤_Č©ę“╦žĄ─ė░ĒæŻ█12Ż▌Ż¼Š▀ėą┐žųŲģóöĄ╔┘Īó╩šö┐╦┘Č╚┐ņĪóš`▓Ņčaāöą¦╣¹║├Ą╚ā׳cŻ«
╗∙ė┌┤╦Ż¼▒Š╬─öM▓╔ė├3éƬÜ┴óĖ▀╦┘å╬─┐ŽÓÖCŻ¼ī”╗∙ė┌╔½Ä¦ę²ī¦║═Æ▀┤aČ©╬╗Ą─é„ĮyęĢėXī¦║ĮĘĮ╩Įųž▌dAGVĮYśŗ▀MąąĖ─▀MŻ¼į┌AGV┐žųŲŽĄĮyųą▓╔ė├ADRC┐žųŲ▓▀┬įī”ö_äė▀MąąīŹĢrčaāöŻ¼ęįŲ┌╠ßĖ▀AGVĄ─▀\äėņ`╗Ņąį║═ī¦║ĮŠ½Č╚Ż«
AGV▀\ąąĢrĄ─ī¦║Įņ`╗Ņąį║═Š½Č╚╩ŪįuārŲõŽĄĮyąį─▄Ą─ĻPµIę“╦žŻ« ī¦║ĮĄ─ņ`╗Ņąį┼cī¦║ĮĘĮ╩Į║═AGVĮYśŗėąĻPŻ¼ī¦║ĮŠ½Č╚┼cAGV┐žųŲ╦ŃĘ©ėąų▒Įė┬ōŽĄŻ«
▒Š╬─ī”▓╔ė├é„ĮyęĢėXī¦║ĮĘĮ╩ĮĄ─ųž▌dAGVĮYśŗ▀MąąĖ─▀MŻ¼īó╔½Ä¦ę²ī¦║═Æ▀┤aČ©╬╗ī¦║ĮųąĄ─1éĆ╗“2éĆå╬─┐Ė▀╦┘ŽÓÖCĖ─×ķ3éƬÜ┴óå╬─┐Ė▀╦┘ŽÓÖC(3C)Ż¼Ūęī”ŲõõüįOĘĮ╩Į▀Mąąā×╗»Ż¼Ė─▀M║¾Ą─AGV¤oąĶ╔½Ä¦ę²ī¦Ż¼ų╗ąĶÆ▀┤aŠ═┐╔ęįīŹ¼Fī¦║ĮŻ¼AGV▀\ąąņ`╗ŅŻ«į┌AGV┐žųŲ╦ŃĘ©╔ŽŻ¼▓╔ė├ADRC▓▀┬įī”ö_äė▀MąąīŹĢrčaāöŻ¼ęįŽ¹│²Ė„ĘN▓╗┤_Č©ę“╦žĄ─ė░ĒæŻ¼╩╣AGV▀\ąąĘĆČ©Īó┐ņ╦┘Ēææ¬Ż¼─▄▀mė├ė┌Å═ļs▄ćķgŁhŠ│Ż«Įø▀^Ė─▀MĄ─3CęĢėXī¦║Įųž▌dAGVĮYśŗ╚ńłD1╦∙╩ŠŻ¼ŲõųąAGVųąą─▌Só┘Ī¬ó█╬╗ų├░▓čbĖ▀╦┘å╬─┐ęĢėXŽÓÖCŻ¼ŪęŽÓÖC1┼cŽÓÖC2ų«ķgĄ─ųąą─ŠÓļx║═ŽÓÖC2┼cŽÓÖC3ų«ķgĄ─ųąą─ŠÓļxŽÓĄ╚Ż« ŽÓÖC▓╔ė├PGV╣ŌīWŽÓÖCŻ¼═©▀^ļpȵ▌å“īäėįOėŗŻ¼┐╔īŹ¼FįŁĄž360ĪŃ▐DÅØ; ×ķ▒▄├Ōø_═╗Ż¼į┌ó▄Ī¬ó▀╬╗ų├╔Ž░▓čb╝ż╣Ō▒▄šŽ└ū▀_Ż«
AGV┐žųŲŽĄĮyĮYśŗ╚ńłD2╦∙╩ŠŻ¼ų„ę¬ė╔ļŖ│ž╣▄└Ē─ŻēKĪó▒▄šŽ─ŻēKĪó3C ęĢėXī¦║Į─ŻēKĪó╦┼Ę■“īäė┼c▐DŽ“─ŻēKĪó▄ć▌d┐žųŲ─ŻēK║═╔Ž╬╗ÖC┐žųŲ─ŻēKĄ╚ĮM│╔Ż« ┐žųŲŽĄĮy▓╔ė├Ęų▓╝╩Į┐žųŲŻ¼ė╔ā╔╝ē╬óÖCĮM│╔Ż¼▄ć▌d┐žųŲ─ŻēK▓╔ė├╬„ķTūėS7ŻŁ1200PLCŻ¼╔Ž╬╗ÖC┐žųŲ─ŻēK▓╔ė├╣ż┐žÖCŻ¼╝╚┐╔ęįīŹ¼Få╬AGV¬Ü┴ó▀\ąąŻ¼ėų┐╔ęįīŹ¼FČÓAGV═¼Ģr▀\ąąŻ«
łD 1 Ė─▀M║¾Ą─3CęĢėXī¦║Įųž▌dAGVĮYśŗ
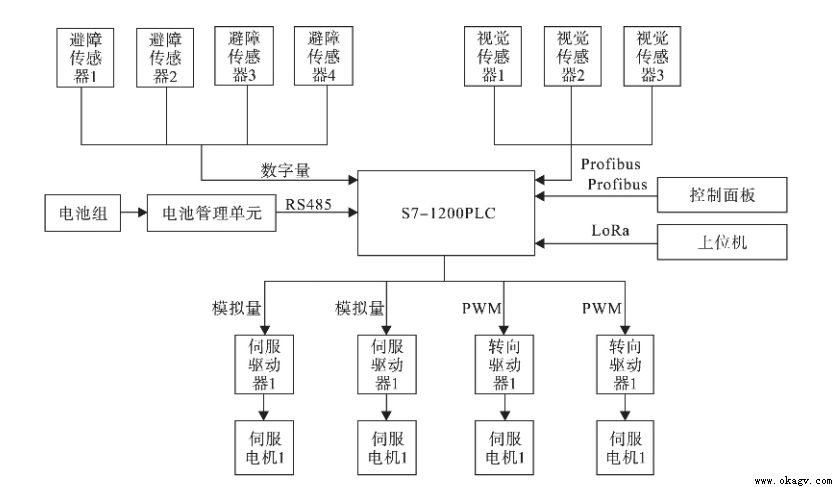
łD 2 AGV ┐žųŲŽĄĮyĮYśŗłD
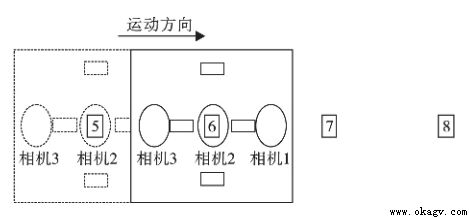
Ė∙ō■Ė─▀M║¾AGV╔Ž3éĆŽÓÖCĘų▓╝Ą─ĮYśŗ╠ž³cŻ¼įOėŗöĄō■ŠžĻć┤aĄ─õüįOĘĮ╩ĮŻ¼ŽÓÓÅā╔éĆöĄō■ŠžĻć┤aų«ķgĄ─ųąą─ŠÓļx┼cā╔éĆŽÓÖCų«ķgųąą─ŠÓļxŽÓĄ╚Ż«AGVī¦║Į╩ŠęŌłDęŖłD 3Ż¼ŲõųąŠÄ╠¢5Ī¬8╩ŪõüįOį┌Ąž├µ╔ŽĄ─öĄō■ŠžĻć┤aŻ««öAGVÅ─šŠ³c5▀\äėĄĮšŠ³c6ĢrŻ¼AGV▀\ąąĘų×ķā╔▓Į:1)ŽÓÖC1┼cŽÓÖC3═¼ĢrĘųäeÆ▀├ĶšŠ³c6┼cšŠ³c5Ą─ą┼ŽóŻ¼AGV£p╦┘▀\ąą; 2) «öŽÓÖC2ųąą─╬╗ų├┼cšŠ³c6ųąą─╬╗ų├ū°ś╦ųž║ŽĢrŻ¼AGV═Żų╣Ż«
į┌ąą▀M▀^│╠ųąŻ¼AGVļy├ŌĢ■│÷¼F▄ē█Eš`▓ŅŻ¼ę“┤╦×ķ▒ŻūCAGV▄ē█E│÷¼Fš`▓Ņ║¾─▄╝░Ģr▀Mąąą▐š²Ż¼3éƬÜ┴óŽÓÖCį┌šŠ³cķg▀\ąąĢr(╝┤Å─ŠžĻć┤a▀M╚ļÆ▀├Ķģ^ĄĮļxķ_Æ▀├Ķģ^)Ż¼▓╗öÓÆ▀├ĶšŠ³cš`▓ŅŻ¼▓óīóÆ▀├Ķš`▓Ņą┼ŽóīŹĢré„▀fĮo╔Ž╬╗ÖCŻ«╔Ž╬╗ÖC┐žųŲ╦ŃĘ©ī”Ųõ▄ē█E▀Mąąą▐š²▓óŽ┬░lĮoAGV▀Mąą▄ē█EĖ·█ÖŻ¼Å─Č°īŹ¼FAGVī¦║ĮŻ«ęĢėXŽÓÖCį┌AGVųą▌SŠĆ╔ŽŻ¼AGVŲ½ęŲ┴┐ė╔öĄō■ŠžĻć┤aŲ½▓ŅųĄ║═Ų½ęŲĮŪČ╚ĮM│╔Ż«į┌AGV▀\ąą▀^│╠ųąŻ¼ŽÓÖCį┌─│Ģr┐╠Æ▀├Ķ─│öĄō■ŠžĻć┤aĢrŲ½▓Ņ║═Ų½ęŲĮŪČ╚╚ńłD4╦∙╩ŠŻ«łD4ęįŽÓÖCūx╚Īģ^ė“Į©┴óŠų▓┐ū°ś╦ŽĄŻ¼ęį╣żū„▄ćķgĮ©┴ó╚½Šųū°ś╦;ė╔1Ż¼2Ż¼3Ż¼4ĮM│╔Ą─š²ĘĮą╬ģ^ė“╩ŪöĄō■ŠžĻć┤aŻ¼Ų½▓ŅĮŪ╩Ū”┴0.į┌AGV▀\ąą▀^│╠ųąŻ¼ų╗ę¬ėąę╗éĆŽÓÖCÆ▀├ĶĄĮöĄō■ŠžĻć┤aŻ¼Ū░Īó║¾Čµ▌åŠ═Ģ■═¼ĢrūįäėĄž▀Mąąš`▓Ņą▐š²Ż¼▀@ĘNą▐š²ĘĮ╩Į▌^ņ`╗ŅŻ¼▀\╦Ń┴┐▌^ąĪŻ«
łD 3 AGVī¦║Į╩ŠęŌłD
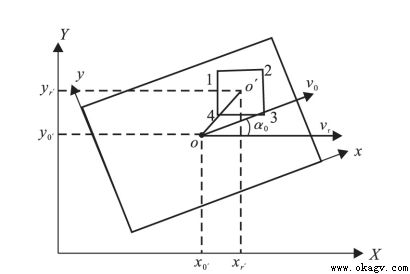
łD 4 Æ▀├ĶöĄō■ŠžĻć┤aŲ½▓Ņ║═Ų½ęŲĮŪČ╚╩ŠęŌłD
╚½Šųū°ś╦Ž┬ŽÓÖCūx╚Īģ^ė“ųąą─╬╗ū╦×ķO(x0'Ż¼y0'Ż¼”┴0')Ż¼īóŲõ▐D╗»×ķAGVŲ½▓Ņ╬╗ū╦O(x0Ż¼y0Ż¼”┴0).öĄō■ŠžĻć┤aųąą─╬╗ū╦×ķO'(xr'Ż¼yr'Ż¼”┴r')Ż¼īóŲõ▐D╗»×ķAGVŲ┌═¹╬╗ū╦O'(xrŻ¼yrŻ¼”┴r)Ż«AGVŲ┌═¹▄ē█E▀\äėīW─Żą═×ķ
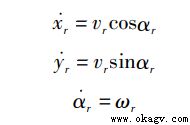
ŲõųąŻ¼vr×ķŲ┌═¹╦┘Č╚Ż¼”žr×ķŲ┌═¹ĮŪ╦┘Č╚Ż¼”┴rųĄ┐╔×ķ0ĪŃŻ¼Ī└90ĪŃŻ¼180ĪŃŻ«īó╚½Šųūā┴┐Ž┬╬╗ū╦š`▓Ņ▐DōQĄĮŠų▓┐ūā┴┐Ž┬AGV╬╗ū╦š`▓Ņ╣½╩ĮŻ█13Ż▌×ķ
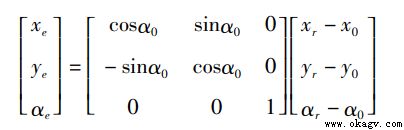
Šų▓┐ū°ś╦Ž┬AGV╬╗ū╦š`▓Ņ╬óĘųĘĮ│╠×ķ
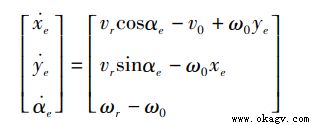
ŲõųąŻ¼v0×ķAGV▀\ąą╦┘Č╚Ż¼”ž0×ķAGV▀\ąąĮŪ╦┘Č╚Ż«
į┌AGVŽĄĮyųąŻ¼ADRC╩Ūė├ė┌╔Ž╬╗ÖC┐žųŲ─ŻēKĄ─┐žųŲ╦ŃĘ©Ż«═©▀^3CęĢėXī¦║Į▓╔╝»Ą─ū°ś╦ą┼Žóé„▀fĮo╔Ž╬╗ÖCŻ¼Įø▀^╔Ž╬╗ÖCųąĄ─ADRCĖ·█ÖŲ„▀Mąąą▐š²Ż¼īóą▐š²║¾Ą─ū°ś╦ųĖ┴ŅŽ┬░lĮoPLCŻ¼į┘═©▀^PLCī”AGV▀Mąą┐žųŲŻ«
ADRCĖ·█ÖŲ„ų„ę¬░³║¼╬óĘųĖ·█ÖŲ„ĪóöUÅłĀŅæBė^▓ņŲ„║═š`▓ŅĘ┤üŽĄĮyŻ«╬óĘųĖ·█ÖŲ„( TD) ŠĆąįĀŅæBĘĮ│╠×ķ
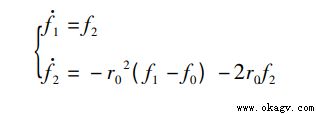
ŲõųąŻ¼r0 ×ķĖ·█Ö╦┘Č╚ę“ūėŻ¼r0 įĮ┤¾Ė·█Ö╦┘Č╚įĮ┐ņ; f0×ķ▌ö╚ļą┼╠¢; f1Ż¼f2×ķ f0Ą─Ė·█Öą┼╠¢Ż«
öUÅłĀŅæBė^▓ņŲ„( ESO) ŠĆąįš`▓ŅĘĮ│╠×ķ
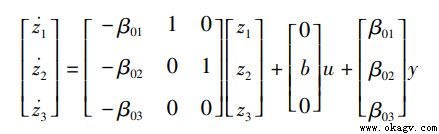
ŲõųąŻ¼u×ķ▒╗┐žŽĄĮy▌ö╚ļ;y×ķADRC▌ö│÷;z1Ż¼z2Ż¼z3×ķŽĄĮyĀŅæBūā┴┐╣└ėŗųĄ;”┬01Ż¼”┬02║═”┬03×ķįOų├ģóöĄ;b×ķ┐žųŲ┴┐ŽĄöĄŻ«š`▓ŅĘ┤ü┐žųŲŽĄĮyųą─┐ś╦┼c▌ö│÷ųĄų«ķgĄ─š`▓Ņ╝░Ųõ╬óĘųš`▓Ņą┼╠¢║═▒╗┐žŽĄĮy▌ö╚ļŻ¼ŽÓæ¬ėŗ╦Ń╣½╩ĮĘųäe×ķ
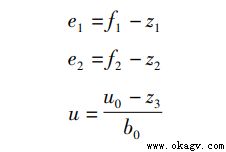
ŲõųąŻ¼e1╩Ūš`▓ŅŻ¼e2╩Ū╬óĘųš`▓ŅŻ¼b0×ķ┐╔š{ģóöĄŻ¼u0×ķŽĄĮyĄ─┐žųŲ┬╔Ż«
Ė·█Ö┐žųŲŲ„ĮYśŗ╚ńłD5╦∙╩ŠŻ¼AGV▄ē█Eū╦æBš`▓ŅųĄŻ█xeŻ¼yeŻ¼”┴eŻ▌T ╩ŪADRC▌ö╚ļŻ¼ADRC▌ö│÷╩ŪŻ█xeŻ¼yeŻ¼”┴eŻ▌TŻ¼ŽĄĮy▌ö│÷╩ŪAGVīŹļH▀\ąąū╦æBŻ█x0Ż¼y0Ż¼”┴0Ż▌TŻ¼┤╦ĢrŽĄĮy╩Ū╚²▌ö╚ļ╚²▌ö│÷Ż¼ę“┤╦ąĶę¬3éƬÜ┴óADRC┐žųŲŲ„Ż¼īó▄ē█Eū╦æBš`▓Ņ┐┤│╔3éĆå╬▌ö╚ļå╬▌ö│÷ŽĄĮyŻ«
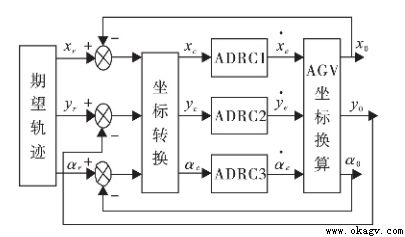
łD 5 AGV ▄ē█EĖ·█Ö┐žųŲŲ„ĮYśŗ
3éƬÜ┴ó ADRC Ą─┐žųŲ┬╔ u0xŻ¼u0yŻ¼u0”┴×ķ
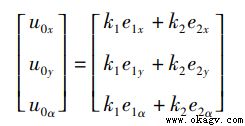
ŲõųąŻ¼k1║═k2Ęųäe╩Ū▒╚└²║═╬óĘų┐žųŲį÷ęµ; e1xŻ¼e1yŻ¼e1”┴╩Ū3éƬÜ┴óADRCĄ─ū╦æBš`▓Ņ; e2xŻ¼e2yŻ¼e2”┴╩Ū3éƬÜ┴óADRCĄ─╬óĘųū╦æBš`▓ŅŻ«
×ķ┴╦“×ūC▒Š╬─įOėŗĄ─╗∙ė┌ADRCĄ─3CęĢėXī¦║Įųž▌dAGVŽĄĮyĄ─ąį─▄Ż¼ęįMatlab×ķŲĮ┼_▀MąąĘ┬šµŻ« įOČ©AGV╦┘Č╚×ķ1m/sŻ¼ADRC┐žųŲģóöĄr0= 10Ż¼b0 = 1Ż¼w = 10Ż¼”┬01 = 30Ż¼”┬02 = 300Ż¼”┬03 = 1000Ż¼k1 = 5Ż¼k2 = 3Ż« łAą╬▄ē█E║═ų▒ŠĆ▄ē█EĖ·█ÖŪ·ŠĆ┼c╬╗ū╦š`▓ŅŪ·ŠĆĘųäe╚ńłD6║═łD7╦∙╩ŠŻ¼łDųą▄ē█EĖ·█ÖŪ·ŠĆÖMĪó┐vū°ś╦▒Ē╩ŠAGVį┌╚½Šųū°ś╦Ž┬Ą─▄ē█E╬╗ų├;╬╗ū╦š`▓ŅŪ·ŠĆÖMū°ś╦▒Ē╩ŠAGV▀\ąąĢrķgŻ¼┐vū°ś╦▒Ē╩ŠAGVį┌╚½Šųū°ś╦Ž┬Ą─╬╗ū╦š`▓ŅŻ«
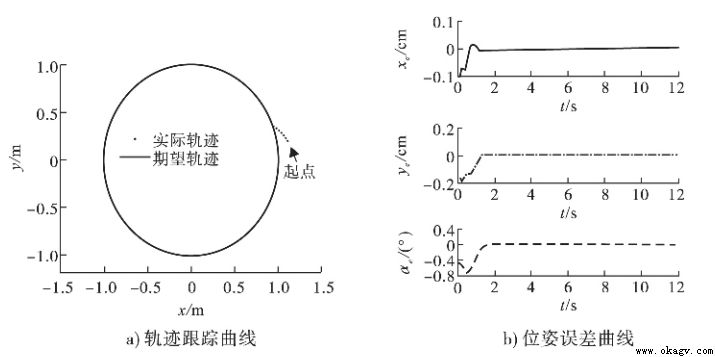
łD 6 łAą╬▄ē█EĖ·█Ö┼c╬╗ū╦š`▓ŅŪ·ŠĆ
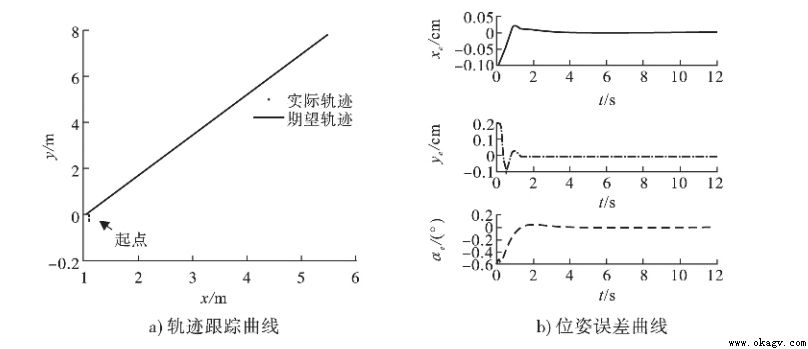
łD 7 ų▒ŠĆ▄ē█EĖ·█Ö┼c╬╗ū╦š`▓ŅŪ·ŠĆ
ė╔łD6║═łD7┐╔ų¬Ż¼įOų├AGVŲ╩╝╬╗ų├į┌▄ē█E═ŌŻ¼Å─│§╩╝Ģr┐╠ķ_╩╝Ż¼łAą╬▄ē█EųąAGV─▄į┌1.9SĢr│╔╣”Ė·█ÖĄĮĮoČ©Ą─ģó┐╝▄ē█EĢr│╔╣”Ė·█ÖĄĮĮoČ©Ą─ģó┐╝▄ē█E;ų▒ŠĆ▄ē█Eųą AGV─▄į┌3.9sĢr│╔╣”Ė·█ÖĄĮĮoČ©Ą─ģó┐╝▄ē█EŻ¼šf├„╗∙ė┌ADRCĄ─3CęĢėXī¦║Įųž▌dAGVŽĄĮyĒææ¬╦┘Č╚▌^┐ņŻ«▀\ąąĘĆČ©║¾Ż¼łAą╬▄ē█Eųą└ĒŽļĖ·█Ö╬╗ų├š`▓ŅąĪė┌1mmŻ¼└ĒŽļŲ½ęŲĮŪš`▓Ņ┌ģĮ³ė┌0;ų▒ŠĆ▄ē█EųąAGV└ĒŽļĖ·█Ö╬╗ų├š`▓Ņ║═└ĒŽļŲ½ęŲĮŪš`▓Ņ┌ģĮ³ė┌0Ż«ę“┤╦Ż¼╗∙ė┌ADRCĄ─3CęĢėXī¦║Įųž▌dAGVŽĄĮy─▄ėąą¦īŹ¼F▄ē█EĄ─īŹĢrĖ·█ÖŪęī¦║ĮŠ½Č╚▌^Ė▀Ż«
×ķ┴╦“×ūC▒Š╬─╗∙ė┌ADRCĄ─3CęĢėXī¦║Įųž▌dAGVŽĄĮyį┌īŹļHæ¬ė├ųąĄ─▀\ąąŪķørŻ¼į┌¼Fł÷▀Mąą┴╦īŹļH▀\ąą£yį毫╣®£yįćė├Ą─AGVĄ─ķLČ╚×ķ1.8mŻ¼▄ć╔Ž░▓čbĄ─ā╔éĆŽÓÓÅŽÓÖCų«ķgųąą─╬╗ų├ŠÓļx×ķ0.75mŻ¼ę“┤╦õüįOį┌Ąž├µ╔ŽĄ─ŽÓÓÅā╔éĆöĄō■ŠžĻć┤aų«ķgĄ─ųąą─ŠÓļxę▓×ķ0.75mŻ«įOų├Ą─ų▒ŠĆ┬ĘÅĮųąŻ¼┬ĘÅĮķL15mŻ¼╣▓õüįO22éĆöĄō■ŠžĻć┤aŻ¼×ķ▀Mę╗▓Į£yįćŲõ▐DÅØąį─▄Ż¼į┌┬ĘÅĮųąĄ─Ų╩╝╬╗ų├▀MąąįŁĄž┴Ń░ļÅĮ▐DÅØŻ«į┌0.5m/sŻ¼1.0m/sŻ¼1.5m/sŻ¼2.0m/sŻ¼2.5m/s║═ 3.0m/s╦┘Č╚Ž┬Ż¼ĘųäeėøõøAGVŪ░▀M( ║¾═╦)ĪóįŁĄžū¾▐D(ėę▐D) ĢrĄ─ūŅ┤¾ī¦║Įš`▓Ņ║═ūŅ┤¾Ų½▓ŅĮŪŻ¼ųžÅ═▀Mąą50┤╬Ż¼╚╗║¾╚ĪŲĮŠ∙ųĄŻ¼ĮY╣¹ęŖ▒Ē 1 ║═▒Ē 2Ż«
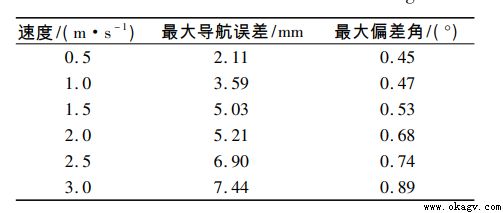
▒Ē 1 AGV Ū░▀M( ║¾═╦) ▀\ąąš`▓Ņ
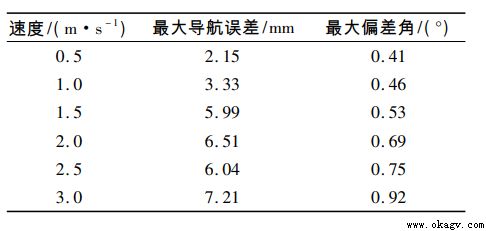
▒Ē 2 AGV įŁĄžū¾( ėę) ▐DÅØš`▓Ņ
ė╔▒Ē1║═▒Ē2┐╔ų¬Ż¼į┌īŹļH▀\ąąųąŻ¼ų▒ąąĢrūŅ┤¾ī¦║Įš`▓Ņ×ķ7.44mmŻ¼ūŅ┤¾Ų½ęŲĮŪ×ķ0.89ĪŃ;įŁĄž90ĪŃ▐DÅØĢrŻ¼ūŅ┤¾ī¦║Įš`▓Ņ×ķ7.21mmŻ¼ūŅ┤¾Ų½ęŲĮŪ×ķ0.92ĪŃŻ«įōĮY╣¹┼cĘ┬šµĮY╣¹ųąĄ─└ĒŽļŠ½Č╚ėąę╗Č©▓ŅŠÓŻ¼▀@┼cīŹļHĄ─Ąž├µŲĮš¹Č╚Īó╣Ō╗¼Č╚ĪóAGV▄ć¾wĄ─ųŲįņ╣ż╦ćĄ╚ę“╦žėąĻPŻ«ė╔┤╦┐╔ų¬Ż¼╗∙ė┌ADRCĄ─3CęĢėXī¦║Įųž▌dAGVŽĄĮyūŅ┤¾ī¦║Įš`▓ŅĮ^ī”ųĄąĪė┌8mmŻ¼ūŅ┤¾Ų½ęŲĮŪĮ^ī”ųĄąĪė┌1ĪŃŻ«┤╦ŽĄĮyī¦║ĮĘĮ╩Į║åå╬Ż¼öĄō■ŠžĻć┤aõüįO▒Ń└¹Ż¼ī¦║ĮŠ½Č╚Ė▀Ż¼AGV ▀\ąąĘĆČ©Ūęņ`╗ŅŻ«
▒Š╬─ī”╗∙ė┌╔½Ä¦ę²ī¦║═Æ▀┤aČ©╬╗Ą─é„ĮyęĢėXī¦║ĮĘĮ╩Įųž▌dAGVĮYśŗ▀Mąą┴╦Ė─▀MŻ¼įOėŗ┴╦╗∙ė┌ADRCĄ─3CęĢėXī¦║Įųž▌dAGVŽĄĮyŻ«įōįOėŗ▓╔ė├3éƬÜ┴óå╬─┐ŽÓÖCŻ¼¤oąĶ╔½Ä¦ę²ī¦Ż¼ų╗ąĶõüįOöĄō■ŠžĻć┤a╝┤┐╔īŹ¼Fī¦║ĮŻ¼į┌ī¦║Į┐žųŲ╦ŃĘ©ųą▓╔ė├ADRCęįėąą¦Ž¹│²Ė„ĘN═ŌĮńĖ╔ö_Ż«Ę┬šµ┼cīŹļHæ¬ė├ĮY╣¹▒Ē├„Ż¼AGV▀\ąąĘĆČ©Īóņ`╗ŅŻ¼Ēææ¬╦┘Č╚┐ņŻ¼ūŅ┤¾ī¦║Įš`▓ŅĮ^ī”ųĄąĪė┌8mmŻ¼ūŅ┤¾Ų½ęŲĮŪĮ^ī”ųĄąĪė┌1ĪŃŻ¼į┌Å═ļs▄ćķgŁhŠ│Ž┬┐╔īŹ¼F▄ē█EĄ─īŹĢrĖ·█ÖŻ¼ąį─▄Ė▀ė┌═¼ŅÉ«aŲĘŪęųŲįņ│╔▒ŠĄ═Ż¼Š▀ėą▌^Ė▀Ą─╣ż│╠īŹė├ārųĄŻ«į┌įō蹊┐│╔╣¹Ą─╗∙ĄA╔ŽŻ¼Ž┬ę╗▓Įīóį┌ADRC┐žųŲųąę²╚ļ╚╦╣żųŪ─▄╦ŃĘ©Ż¼└¹ė├ųŪ─▄╦ŃĘ©ūįäėš{╣ØADRCųąąĶę¬įOų├Ą─│ŻöĄģóöĄŻ¼īóŲõūā│╔äėæBš{š¹ūā┴┐Ż¼▀Mę╗▓Į╠ßĖ▀ADRC╩šö┐╦┘Č╚Ż¼£p╔┘╦∙ąĶģóöĄįOų├Ż¼▀MČ°╠ßĖ▀AGV▀\ąąĒææ¬╦┘Č╚Ż«
Ż█1Ż▌ BACIK JŻ¼DUROVSK YFŻ¼BIR0S MŻ¼et alŻ« Pathfinder-development of automated guided vehicle for hospital logistics Ż█JŻ▌Ż« IEEE AccessŻ¼2017Ż¼5: 26892Ż«
Ż█2Ż▌ ▀^Į│¼Ż¼┌w║Żč¾Ż¼╩Yš²┐┬Ż¼Ą╚Ż« ļpŽ“ųž▌dųŪ─▄ūįų„ī¦║Į▄接ĮyįOėŗŻ█JŻ▌Ż« ▌p╣żīWł¾Ż¼2017Ż¼32( 2) : 97Ż«
Ż█3Ż▌ Ė▀ĶżŻ¼▀^Į│¼Ż¼┤▐╣ŌššŻ« ę╗ĘNĖ─▀MĄ─ČÓÖCŲ„╚╦┬ĘÅĮęÄäØūį▀mæ¬╚╦╣żä▌ł÷Ę©Ż█JŻ▌Ż« ÓŹų▌▌p╣żśIīWį║īWł¾( ūį╚╗┐ŲīW░µ) Ż¼2013Ż¼28( 6) : 77Ż«
Ż█4Ż▌ ąż½IÅŖŻ¼│╠üå▒°Ż¼═§╝ęČ„Ż« ╗∙ė┌æTąį║═ęĢėXÅ═║Žī¦║ĮĄ─ AGV 蹊┐┼cįOėŗŻ█JŻ▌Ż« ųąć°ÖCąĄ╣ż│╠Ż¼2019Ż¼30( 22) : 1Ż«
Ż█5Ż▌ LEE S YŻ¼YANG H WŻ« Navigation of automated guided vehicle suing magnet spot guidance method Ż█JŻ▌Ż« Robotics Ż” Computer Integrated ManufacturingŻ¼2012Ż¼28( 3) : 425Ż«
Ż█6Ż▌ LU SŻ¼XU CŻ¼ZHONG R YŻ« A RFID-enabled positioning system automated guided vehicle for smart factories Ż█JŻ▌Ż« Journal of Manufacturing SystemsŻ¼2017Ż¼44: 179Ż«
Ż█7Ż▌ JUNG KŻ¼KIM JŻ« Intelligent autonomous systemsŻ█MŻ▌Ż« Berlin Heidelberg: SpringerŻ¼2013: 807 ŻŁ816Ż«
Ż█8Ż▌ OSMAN KŻ¼GHOMMAM JŻ¼SAAD MŻ« Vision based lane reference detection and tracking control of an automated guided vehicle Ż█CŻ▌Ī╬IEEE Control Systems SocietyŻ« 2017 25th Mediterranean Conference on Control and AutomationŻ« Piscataway: IEEEŻ¼2017: 595Ż«
Ż█9Ż▌ XU ZŻ¼HUANG SŻ¼DING JŻ« A New positioning method for indoor laser navigation on under determined condition Ż█CŻ▌Ī╬IEEE Control Systems SocietyŻ« 2016 Sixth International Conference on Instrumentation Ż” MeasurementŻ¼ComputerŻ¼Communication and ControlŻ« Piseatamay: IEEEŻ¼2016: 703Ż«╬─š┬üĒį┤ė┌AGV░╔
Ż█10Ż▌ ═§┴š╚AŻ« ┤┼ī¦╩Į AGV ūįäėī¦║Į▄ć┐žųŲŽĄĮyĄ─įOėŗŻ█DŻ▌Ż« ķL╔│: ķL╔│└Ē╣ż┤¾īWŻ¼2013Ż«
Ż█11Ż▌ ĮŁüåĘÕŻ¼═§▒“▒“Ż¼į¼├„ą┬Ż¼Ą╚Ż« ╗∙ė┌ūį▀mæ¬Ę┤č▌╗¼─ŻĄ─╚½Ž“ AGV ▀\äė┐žųŲŻ█JŻ▌Ż« ėŗ╦ŃÖCĘ┬šµŻ¼2019Ż¼32( 2) : 348Ż«
Ż█12Ż▌ ĒnŠ®ŪÕŻ« ūį┐╣ö_┐žųŲ╝╝ągĪ¬Ī¬Ī¬╣└ėŗčaāö▓╗┤_Č©ę“╦žĄ─┐žųŲ╝╝ągŻ█MŻ▌Ż« ▒▒Š®: ć°Ę└╣żśI│÷░µ╔ńŻ¼2008: 197 ŻŁ 207Ż«
Ż█13Ż▌ ┴_╚’Ż« ╗∙ė┌ūį┐╣ö_┐žųŲĄ─ęŲäėÖCŲ„╚╦▄ē█EĖ·█ÖŻ█DŻ▌Ż« ╠ņĮ“: ╠ņĮ“╣żśI┤¾īWŻ¼2018Ż«
╔Žę╗ŚlŻ║AGV“īäė▌å£pšæęÆņŽĄĮy│ŻęŖą╬╩Į Ž┬ę╗ŚlŻ║įOų├AGVĄ─┬ĘŠĆ┼cš{Č╚ĘĮĘ©Ż┐
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā