īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





ųŪ─▄é}ā”ęŲäėÖCŲ„╚╦┬ĘÅĮęÄäØĘĮĘ©░³└©ęįŽ┬▓Į¾EŻ║╩ūŽ╚ęŲäėÖCŲ„╚╦į┌─ŻöMĄ─ŁhŠ│ųą▀Mąąė¢ŠÜŻ╗
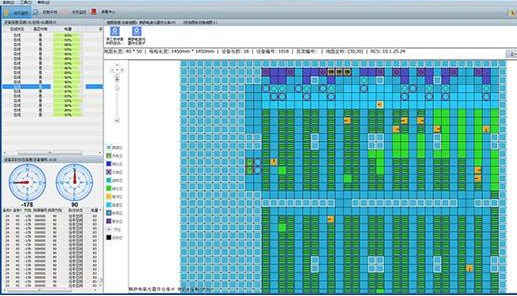
a1Ż║įOų├ęŲäėÖCŲ„╚╦▀\äėĢrĄ──┐ś╦,ļSÖC│§╩╝─┐ś╦³cū°ś╦╬╗ų├ą┼Žó(xt,yt)║═─┐ś╦░ļÅĮĘČć·RmŻ╗xtĪóytĘųäe▒Ē╩Š─┐ś╦³cĄ─ųąą─į┌ņoæBĄžłDųąĄ─XĪóY▌Sū°ś╦,Rm▒Ē╩Šęį(xt,yt)×ķųąą─Ą─▀ģķL×ķdminĄ─š²ĘĮą╬ģ^ė“,į┌ģ^ė“ųąČ╝┐╔╦ŃĄĮ▀_─┐Ą─Ąž,įOČ©ęŲäėÖCŲ„╚╦«öŪ░Ą─╬╗ū╦(x,y,”╚r),xĪóy╩ŪęŲäėÖCŲ„╚╦«öŪ░Ą─╬╗ų├ū°ś╦,”╚r╩ŪęŲäėÖCŲ„╚╦īŹĢrĄ─▀\äėĘĮŽ“┼cX▌SĄ─ŖAĮŪ,▓ó═©▀^─┐ś╦³cį┌ęŲäėÖCŲ„╚╦śOū°ś╦Ž┬Ą─╬╗ų├ą┼Žó(”╚,d)▀Mąą┬ĘÅĮęÄäØ,▓óęį╣╠Č©╦┘Č╚Ž“Ū░ąą±é,”╚╩Ū─┐ś╦³cį┌ęŲäėÖCŲ„╚╦śOū°ś╦Ž┬Ą─ĮŪČ╚ą┼Žó,d╩Ū─┐ś╦³cŠÓęŲäėÖCŲ„╚╦ųąą─Ą─ŠÓļxą┼ŽóŻ╗
a2Ż║ī¦║Į▀^│╠ųą,īóęŲäėÖCŲ„╚╦╔Ž╝ż╣Ōé„ĖąŲ„Öz£yĄĮĄ─ŁhŠ│öĄō■Li║═─┐ś╦╬╗ų├öĄō■Di▀MąąŅA╠Ä└Ē┼c╠žš„╗»,╚╗║¾ŽÓ╚┌║ŽĄ├ĄĮŁhŠ│öĄō■SiŻ╗
a3Ż║└¹ė├╔ŅČ╚┤_Č©╠▌Č╚▓▀┬įĘĮĘ©,Ą├ĄĮŽ┬ę╗▓ĮĄ─äėū„ĀŅæBa,aĪ╩W┤·▒Ēł╠ąąäėū„ĢręŲäėÖCŲ„╚╦╦∙Ų½▐DĄ─ĮŪČ╚į┌WĘČć·ā╚Ż╗
a4Ż║┼ąöÓęŲäėÖCŲ„╚╦╩ŪʱĄĮ▀_─┐ś╦³c(xt,yt),╚ń╣¹ø]ėąätĘĄ╗ža2└^└mī¦║Į,╚ń╣¹ęčĄĮ▀_ätĮY╩°ī¦║ĮŻ╗
a5Ż║ĮY╩°ī¦║Į║¾,Ė∙ō■¬ääŅųĄ,Ė³ą┬╔ŅČ╚┤_Č©╠▌Č╚▓▀┬įĘĮĘ©ųąĄ─▓▀┬įūėŠWĮj,įuārŠWĮjģóöĄ,į┌ė¢ŠÜĄ─│╔╣”┬╩▀_ĄĮ─┐ś╦│╔╣”┬╩║¾,▒Ż┤µį┌╔ŅČ╚┤_Č©╠▌Č╚▓▀┬įĘĮĘ©ųąĄ─ŠWĮjģóöĄŻ╗S2Ż║īŹļHŁhŠ│ęŲäėÖCŲ„╚╦ī¦║Į╩╣ė├į┌S1ųą▒Ż┤µ┴╦ŠWĮjģóöĄĄ─╔ŅČ╚┤_Č©╠▌Č╚▓▀┬įĘĮĘ©▀MąąęŲäėÖCŲ„╚╦äėū„▀xō±ĪŻ
╔Žę╗ŚlŻ║▓µ▄ć╩ĮAGVė├┼e╔²ŽĄĮy Ž┬ę╗ŚlŻ║ęĢėXī¦║ĮAGV╝╝ągĄ─ÖCŲ„╚╦
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā