ÜgėŁ▀M╚ļ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦ŠŠW(w©Żng)šŠŻĪ
īŻśI(y©©)╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«a(ch©Żn)ŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░l(f©Ī)ųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI(y©©)
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░l(f©Ī)ųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI(y©©)
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





ÜWµzagv╣▄ųŲ┼õų├Ż¼ŅÖ├¹╦╝┴xŠ═╩Ūė├ė┌įOČ©AGVį┌ąąū▀ųąĮ╗═©╣▄ųŲ³cĄ─┼õų├ĪŻ╣▄ųŲ┼õų├ų„ę¬ėą╚²éĆĄžĘĮĄ─Į╗═©╣▄ųŲ┼õų├Ż║│ŻęÄ(gu©®)Į╗═©╣▄ųŲģóöĄ(sh©┤)┼õų├Īó│õļŖ³c╠ž╩Ō╣▄ųŲ┼õų├Īó╚╬äš╠µĮė³cĪŻ╚ńŽ┬łD19
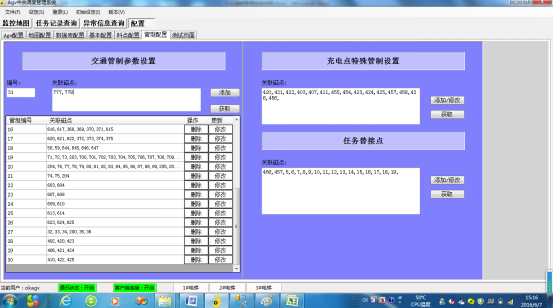
łD19 ╣▄ųŲ┼õų├
│ŻęÄ(gu©®)Į╗═©╣▄ųŲ┼õų├Ż¼ė├ė┌įOČ©š²│Ż┬ĘŠĆ╔Ž╣▄ųŲ³cĪŻĮ╗═©╣▄ųŲĄ─įŁ└Ē×ķŻ║į┌Į╗═©┼õų├└’├µįOČ©═¼ę╗ĘČć·ā╚(n©©i)Ą─┤┼³cŻ¼▄ø╝■┼ąöÓ──ę╗▌vAGVŽ╚▀M╚ļįō╣▄ųŲĘČć·Ż¼╚¶ėąAGV▀M╚ļįōĘČć·Ż¼ätīóįōģ^(q©▒)ė“µiČ©Ż¼ų▒ĄĮįōAGVū▀│÷┤╦ĘČć·į┘īóŲõµiČ©ĮŌ│²Ż¼į╩įSŲõ╦³AGV▀M╚ļĪŻ┤╦╣▄ųŲĘĮĘ©ŽÓī”▒╚▌^ņ`╗ŅŻ¼ę▓┐╔╩╣ė├ŪČ╠ūĄ─ĘĮ╩ĮŻ¼īŹ¼F(xi©żn)ČÓųž╗źµiĪŻ╣▄ųŲĘČć·┐╔▀Mąą╠Ē╝ėĪóą▐Ė─Īóäh│²▓┘ū„ĪŻ
╔Žę╗ŚlŻ║AGV┤┼³c╚ń║╬įOČ©Ż┐ Ž┬ę╗ŚlŻ║ÜWµz¤o▄ēæTąįī¦ę²AGVĮķĮB
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^(q©▒)ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ō(li©ón)ŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā