īŻśI╠ß╣®é}ā”╬’┴„╔²╝ēĖ─įņĪó¤o╚╦░ß▀\ÖCŲ„╚╦«aŲĘ
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860
ę╗╝ęīŻūóÅ═║ŽÖCŲ„╚╦Īó╚½Ž“╝ż╣ŌAGVčą░lųŲįņć°╝ęĖ▀ą┬╝╝ągŲ¾śI
╚½ć°Ę■äš¤ßŠĆ 400-007-3860





ę╗Īó ░Ė└²Ė┼╩÷Ż║
▒Š░Ė└²įOėŗė├ė┌ļŖūėļŖŲ„ąąśIųąļŖūė«aŲĘÅ─«aŠĆĄĮé}ÄņĄ─ęÄĘČ╗»╔ŽŽ┬╝▄ĘųŅÉ┤µā”ĪŻ
▒Š░Ė└²ąĶę¬╔µ╝░ĄĮ┤¾ųž┴┐Ą─│╔ŲĘ▀\▌öŻ¼ęį╝░ęÄ─Ż╗»Ą─ČčĖ▀┤µā”Ż¼╦∙ęįąĶ▓╔ė├ČÓ▌vąĪą═╝ż╣Ō▓µ▄ć┼õ║Ž┐žųŲš{Č╚ŽĄĮyę╗═¼╣żū„ĪŻī”«aŠĆ╔ŽŽ┬üĒĄ─│╔ŲĘ▀MąąŻ¼┼·┴┐╗»ĪóęÄĘČ╗»Ą─▀\▌öĄĮé}ÄņŻ¼▓óŪęūįäė░ß▀\ĄĮžø╝▄╔Ž▀Mąąėøõø┤µā”ĪŻ
Č°Ūęę╗▌v▓µ▄ćŠ═─▄▀\▌dČÓéĆåT╣żČÓ┤╬▀\▌dĄ─žø╬’┴┐ĪŻČ°Ūę╝ż╣Ō▓µ▄ć┼c┐žųŲŽĄĮy┼õ║ŽŻ¼┐╔ęįī”├┐┤╬▀\▌dĄ─žø╬’Ė∙ō■▓╗═¼┼·┤╬╗“š▀▓╗═¼«aŲĘęÄät▀MąąĘųķ_ČčĖ▀┤µā”Ż¼▓óėøõø«aŲĘ╦∙┤µā”Ą─╬╗ų├Ż¼ĘĮ▒Ńęį║¾▓ķšę│÷žøĪŻ
▓╔ė├ųŪŠ├╝ż╣Ō▓µ▄ć┐╔╚½├µĖ─╔Ų«aŠĆĄĮé}Äņ│╔ŲĘ▀\▌öĄ─ą¦┬╩Ż¼£p╔┘Ų¾śIį┌│╔ŲĘ▀\▌öŁh╣ØĄ─┤¾▓┐ĘųĄ─╚╦╣ż│╔▒Š═Č╚ļŻ¼£p╔┘╬ęć°╚╦┐┌╝t└¹Ž┬ĮĄÄ¦üĒĄ─åT╣ż│╔▒Š▀^Ė▀Ż¼šą╣żļyĄ╚å¢Ņ}ĪŻĮŌøQįŁ▒Š▓╔ė├ÖCąĄ▓µ▄ćČčĖ▀┤µā”įņ│╔Ą─ŠSūo╝░Ž¹║─┘Mė├│╔▒Š▀^Ė▀Ż¼▒®┴”▀\▌öī¦ų┬žø╬’ōpē─Ą╚å¢Ņ}ĪŻ╩╣é}Äņ┤µā”Ė³╝ėųŪ─▄╗»Ż¼Ė─╔ŲįŁ▒Šļsüy¤oš┬Ą─é}ÄņŁhŠ│Ż¼Ė³╝ė║Ž└ĒĄ─Ęų┼õ└¹ė├é}Äņ┐šķgĪŻ
╚²Īó ĮŌøQĘĮ░Ė
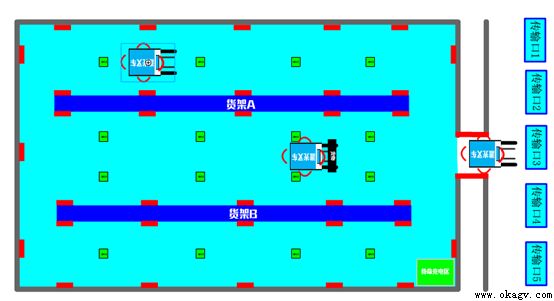
Ė∙ō■¼Fł÷Ą─┐▒▓ņŪķørŻ¼AGV¼Fł÷╩ŠęŌłD╝░ŽĄĮyęÄäØ╚ńŽ┬Ż║
1. ŠĆ┬Ęšf├„┼c╝╝ągę¬³cŻ║
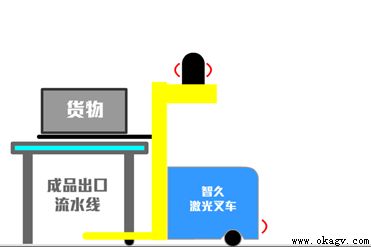
a) ╝ż╣Ō▓µ▄ćĄ─╣żū„┴„│╠
1.╝ż╣Ō▓µ▄ćąĪ▄ćį┌┤²├³ģ^┤²├³Ż¼Ą╚┤²ł╠ąą├³┴ŅĪŻ
2.«ö│╔ŲĘ«aŠĆé„▌ö┐┌ģ^└’ėą│╔ŲĘŽ┬ŠĆĢrŻ¼Ėąæ¬čbų├ūįäėŽ“┐žųŲŽĄĮy░l╦═╚╬äšą┼ŽóĪŻ
3.┐žųŲŽĄĮy╩šĄĮ╚╬äšą┼ŽóĘ┤ü║¾Ż¼Ģ■Ė∙ō■Ė„▌v╝ż╣Ō▓µ▄ćĄ─╬╗ų├▀Mąą╚╬äšĘų┼õ▓óęÄäØ║├▓µ▄ć▀\ąąĄ─┬ĘŠĆęį╝░žø╬’ČčĘ┼Ą─žø╝▄╠¢Ż¼ėŗ╦Ń═Ļ│╔║¾┐žųŲŽĄĮy░l│÷╚╬äšųĖ┴ŅĪŻ
4.╝ż╣Ō▓µ▄ć└¹ė├ūį╔Ēčb┼õĄ─ŠWĮjčbų├Ż¼╝ż╣Ō▓µ▄ćĮė╩šĄĮ╚╬äšą┼Žó║¾Ż¼═©▀^ē”▒┌╔Ž┘NėąĄ─Ę┤╣ŌčbŚlĘ┤╔õ╝ż╣Ō┼ąöÓ┬ĘŠĆ┼cšŽĄK╬’Ż¼│÷░lŪ░═∙«aŠĆé„▌öčb▌dģ^ĪŻ
5.╝ż╣Ō▓µ▄ćŻ¼═©▀^ŅAŽ╚įOų├║├Ą─┬ĘŠĆĄĮ▀_│╔ŲĘ«aŠĆé„▌ö┐┌ģ^Ą╚┤²žø╬’Ž┬ŠĆŻ¼▓óī”žø╬’▀Mąąūįäėčb▌dŻ¼▓óčžų°┐žųŲŽĄĮyęÄäØ║├Ą─┬ĘŠĆ▀\▌džø╬’╗žĄĮé}ÄņĪŻ
6.╝ż╣Ō▓µ▄ć═©▀^Ėąæ¬Ąž├µ╔Ž┘NėąĄ─RFIDś╦║ׯ¼ī”žø╝▄Ą─╦∙į┌Ąž▀MąąČ©╬╗Ż¼▓óšęĄĮžø╬’╦∙ę¬ČčĘ┼Ą─žø╝▄╬╗ų├ĪŻ

7.ĄĮ▀_ę¬┤µĘ┼Ą─žø╝▄Ū░║¾Ż¼╝ż╣Ō▓µ▄ćŽ╚īóžø╬’═ąĖ▀ĄĮ╦∙ąĶĄ─Ė▀Č╚Ż¼īóžø╬’Ę┼▀Mžø╝▄ųąĪŻ▓óī”žø╝▄╔ŽĄ─ą┼Žó┐©▀Mąąą┼ŽóūxīæŻ¼Ę┤üĮo┐žųŲŽĄĮyŻ¼ī”žø╬’Ą─┤µĘ┼╬╗ų├▀MąąėøõøĪŻ
8.žø╬’╔Ž╝▄═Ļ│╔║¾Ż¼╝ż╣Ō▓µ▄ć═╦│÷žø╝▄╬╗ų├Ż¼└^└m▀MąąŽ┬ę╗éĆ╚╬䚯¼╗“š▀╗žĄĮĘ■äšģ^│õļŖ╗“š▀┤²├³ĪŻ
╔Žę╗ŚlŻ║AGVÖCŲ„╚╦ČÓ┤·└Ē┬ĘÅĮīżĄ─╦─┤¾čąŠ┐ĘĮŽ“ Ž┬ę╗ŚlŻ║AGVąĪ▄ćī¦║Į╝╝ąg▒╚▌^Ęų╬÷
ļŖįÆŻ║0755-29851810
é„šµŻ║0755-27307147
Q QŻ║2448209188
Ó]ŽõŻ║zfj@okagv.com
ĄžųĘŻ║╔Ņ█┌╩ąīÜ░▓ģ^ĖŻ║ŻĮųĄ└┤¾č¾┬Ęųą╝ZĖŻ░▓ÖCŲ„╚╦┐Ų╝╝ł@14ŚØ

Copyright © 2012-2023 ╔Ņ█┌╩ąÜWµzųŪ─▄ÖCŲ„╚╦╣╔Ę▌ėąŽ▐╣½╦Š ░µÖÓ╦∙ėąĪĪ ╗øICPéõ 19115608 ╠¢ĪĪxml sitemap
┬ōŽĄļŖįÆ
400-007-3860QQū╔įā
2448209188╬óą┼
╬óą┼ū╔įā