ĪĪĪĪĪĪęĢėXī¦║ĮėųĮąū÷łDŽ±ūRäeī¦║ĮŻ¼╦³Ęų×ķā╔ĘNĘĮ╩ĮŻ║ę╗ĘN╩ŪėąŠĆ╩ĮŻ¼┴Ēę╗ĘN╩Ū¤oŠĆ╩ĮĪŻ¤oŠĆ╩ĮĄ─ęĢėXī¦║Į╝╝ąg╩Ū└¹ė├CCDį┌ŽĄĮyäėæBĢröz╚Īų▄ć·ŁhŠ│Ą─ŽÓæ¬Ą─łDŽ±┘Y┴ŽŻ¼▓ó┼cįOČ©Ą─▀\ąą┬ĘÅĮį┌ą┼ŽóöĄō■Äņųą▀Mąą▒╚ī”Ż¼▀MČ°┤_Č©AGV«öŪ░Ąž╬╗ų├Ż¼▀MČ°Įø▀^┐žųŲ─ŻēKī”ąĪ▄ćĄ─▀\ąą┬ĘÅĮ▀MąąīŹĢrĄ─øQ▓▀ĪŻĄ┌ę╗ĘN╝┤ėąŠĆ╩ĮęĢėXī¦║Į╝╝ąg╩ŪĖ∙ō■AGV¼Fł÷Ą─Š▀¾wĄž├µ╗“š▀┬Ę▀ģ├„’@┬Ęś╦Ż¼Įø▀^▄ć▌dĄ─özŽ±čbų├Ż©CCDŻ®äėæBĄž½@╚Ī┬Ę▀ģĄ─łDŽ±Ż¼į┘Įø▀^▄ć▌dĄ─ėŗ╦ŃÖC▀MąąŽÓæ¬Ą─╠Ä└ĒŻ¼▀MČ°ūRäe│÷┬ĘÅĮĄ─ŽÓæ¬ś╦ūRŠĆŻ¼▓óŪę┼ąöÓAGV┼cŲ┌═¹ś╦ūRŠĆĄ─ŠÓļx║═┼cś╦ūRŠĆĄ─ŖAĮŪŻ¼▀MČ°═©▀^“īäėŽĄĮy┐žųŲAGVĄ─īŹļHąą±é┬ĘÅĮį┌┼cŲ┌═¹Ą─┬ĘĮø▒Ż│ųį┌į╩įSĄ─ĘČć·ā╚╝┤┐╔ĪŻ
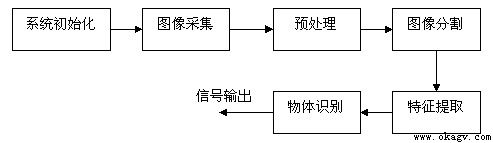
ĪĪĪĪĪĪėąŠĆęĢėXī¦║Į╝╝ągĄ─ā׳c╩ŪŻ║┐╔ęį½@╚Ī▌^┤¾╚▌┴┐Ą─ą┼ŽóĪóŠ▀¾w┬ĘÅĮĄ─įOų├┼cūā╗»▒╚▌^║åå╬ĪóŽĄĮyŠ▀ėą▌^║├Ą─╚ßąįĄ╚Ż¼Č°ŪęŠ▀ėą¼FīŹæ¬ė├Ą─┐╔ąąąį║═▒╚▌^ÅVķ¤Ą─Ū░Š░Ż¼╩Ū¼FĮ±AGVĄ─Ž╚▀MĄ─ī¦║Į╝╝ąg║═ųžę¬░lš╣ĘĮŽ“ĪŻ
ĪĪĪĪĪĪ▄ć▌dözŽ±čbų├ų„ę¬╩Ūė╔CCDözŽ±ÖCĪółDŽ±▓╔╝»┐©Īó╣Ōį┤Ą╚įOéõĮM│╔ĪŻözŽ±čbų├▓╔╝»ą┼ŽóĄ─ļŖ┬ĘįŁ└ĒłDęŖŽ┬łDŻ║
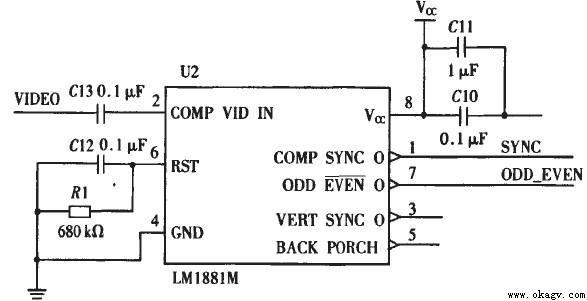
özŽ±Ņ^▓╔╝»ļŖ┬ĘłD
į┌ęĢėXŽĄĮyåóäė║¾Ż¼AGVĄ─▄ć▌dCCDözŽ±ÖCŠ═ī”ąĪ▄ćŪ░ĘĮĄ─┬ĘÅĮ▀MąąŽÓæ¬Ą─łDŽ±▓╔╝»Ż¼Įø▀^łDŽ±▓╔╝»┐©║¾Ż¼Įø▀^╠Ä└Ē║¾╦═ĄĮŽÓæ¬Ą─╔Ž╬╗ėŗ╦ŃÖCĪŻAGVĄ─╔Ž╬╗ėŗ╦ŃÖCĮø▀^ī”Ąž├µĄ─ą┼Žó▀Mąą▀m«öłDŽ±╠Ä└ĒŻ©ų„ę¬░³└©ķōųĄ╠Ä└ĒĪóč┌─żĪóų▒ĘĮłDĘų╬÷ĪółDŽ±ĘųĖŅĪó▀ģŠēÖz£yĪóģ^ė“į÷ķLŻ®┼cłDŽ¾Ęų╬÷Ż©ų„ę¬░³└©╠žš„öz╚ĪĪó╬’¾wūRäeĪó╬╗ų├┤¾ąĪ║═ĘĮŽ“ęį╝░łDŽ±Ųõ╦³╬’└Ē╠žš„Ą─Ęų╬÷║═▌^╔ŅČ╚Ą─ą┼Žó╠Ä└ĒŻ®Ż¼▀MČ°ą╬│╔ŽÓæ¬Ą─┐žųŲųĖ┴ŅŻ¼į┘é„ĄĮ▄ć▌dėŗ╦ŃÖCŻ©å╬Ų¼ÖCŻ®Ż¼▀MČ°┐žųŲAGVĄ─ŽÓæ¬Ą─äėū„ĪŻęĢėXŽĄĮyĄ─╣żū„įŁ└ĒĄ─╩ŠęŌłDŻ║